 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Black-Box Bilevel Optimization with Rank-Based Upper-Level Value Function Approximation
Apr 03, 2026Bilevel optimization is a field of significant theoretical and practical interest, yet solving such optimization problems remains challenging. Evolutionary methods have been employed to address these problems in the black-box setting; however, they incur high computational cost due to the nested nature of bilevel optimization. Although previous methods have attempted to reduce this cost through various heuristic techniques, such approaches limit versatility on challenging optimization landscapes, such as those with multimodality and significant interaction between upper- and lower-level decision variables. In this study, we propose an efficient framework that exploits the invariance of rank-based evolutionary algorithms to monotonic transformations, thereby reducing the computational burden of the lower-level optimization loop. Specifically, our method directly approximates the rankings of the upper-level value function, bypassing the need to run the lower-level optimizer until convergence for each upper-level iteration. We apply this framework to the setting where both levels are continuous, adopting CMA-ES as the optimizer. We demonstrate that our method achieves competitive performance on standard bilevel optimization benchmarks and can solve problems that are intractable with previously proposed methods, particularly those with multimodality and strong inter-variable interactions.
Sample-Efficient Hypergradient Estimation for Decentralized Bi-Level Reinforcement Learning
Mar 16, 2026Many strategic decision-making problems, such as environment design for warehouse robots, can be naturally formulated as bi-level reinforcement learning (RL), where a leader agent optimizes its objective while a follower solves a Markov decision process (MDP) conditioned on the leader's decisions. In many situations, a fundamental challenge arises when the leader cannot intervene in the follower's optimization process; it can only observe the optimization outcome. We address this decentralized setting by deriving the hypergradient of the leader's objective, i.e., the gradient of the leader's strategy that accounts for changes in the follower's optimal policy. Unlike prior hypergradient-based methods that require extensive data for repeated state visits or rely on gradient estimators whose complexity can increase substantially with the high-dimensional leader's decision space, we leverage the Boltzmann covariance trick to derive an alternative hypergradient formulation. This enables efficient hypergradient estimation solely from interaction samples, even when the leader's decision space is high-dimensional. Additionally, to our knowledge, this is the first method that enables hypergradient-based optimization for 2-player Markov games in decentralized settings. Experiments highlight the impact of hypergradient updates and demonstrate our method's effectiveness in both discrete and continuous state tasks.
Cost-Minimized Label-Flipping Poisoning Attack to LLM Alignment
Nov 12, 2025Large language models (LLMs) are increasingly deployed in real-world systems, making it critical to understand their vulnerabilities. While data poisoning attacks during RLHF/DPO alignment have been studied empirically, their theoretical foundations remain unclear. We investigate the minimum-cost poisoning attack required to steer an LLM's policy toward an attacker's target by flipping preference labels during RLHF/DPO, without altering the compared outputs. We formulate this as a convex optimization problem with linear constraints, deriving lower and upper bounds on the minimum attack cost. As a byproduct of this theoretical analysis, we show that any existing label-flipping attack can be post-processed via our proposed method to reduce the number of label flips required while preserving the intended poisoning effect. Empirical results demonstrate that this cost-minimization post-processing can significantly reduce poisoning costs over baselines, particularly when the reward model's feature dimension is small relative to the dataset size. These findings highlight fundamental vulnerabilities in RLHF/DPO pipelines and provide tools to evaluate their robustness against low-cost poisoning attacks.
A Provable Approach for End-to-End Safe Reinforcement Learning
May 28, 2025A longstanding goal in safe reinforcement learning (RL) is a method to ensure the safety of a policy throughout the entire process, from learning to operation. However, existing safe RL paradigms inherently struggle to achieve this objective. We propose a method, called Provably Lifetime Safe RL (PLS), that integrates offline safe RL with safe policy deployment to address this challenge. Our proposed method learns a policy offline using return-conditioned supervised learning and then deploys the resulting policy while cautiously optimizing a limited set of parameters, known as target returns, using Gaussian processes (GPs). Theoretically, we justify the use of GPs by analyzing the mathematical relationship between target and actual returns. We then prove that PLS finds near-optimal target returns while guaranteeing safety with high probability. Empirically, we demonstrate that PLS outperforms baselines both in safety and reward performance, thereby achieving the longstanding goal to obtain high rewards while ensuring the safety of a policy throughout the lifetime from learning to operation.
Feature selection based on cluster assumption in PU learning
Apr 17, 2025Feature selection is essential for efficient data mining and sometimes encounters the positive-unlabeled (PU) learning scenario, where only a few positive labels are available, while most data remains unlabeled. In certain real-world PU learning tasks, data subjected to adequate feature selection often form clusters with concentrated positive labels. Conventional feature selection methods that treat unlabeled data as negative may fail to capture the statistical characteristics of positive data in such scenarios, leading to suboptimal performance. To address this, we propose a novel feature selection method based on the cluster assumption in PU learning, called FSCPU. FSCPU formulates the feature selection problem as a binary optimization task, with an objective function explicitly designed to incorporate the cluster assumption in the PU learning setting. Experiments on synthetic datasets demonstrate the effectiveness of FSCPU across various data conditions. Moreover, comparisons with 10 conventional algorithms on three open datasets show that FSCPU achieves competitive performance in downstream classification tasks, even when the cluster assumption does not strictly hold.
Challenges of Interaction in Optimizing Mixed Categorical-Continuous Variables
Apr 01, 2025Optimization of mixed categorical-continuous variables is prevalent in real-world applications of black-box optimization. Recently, CatCMA has been proposed as a method for optimizing such variables and has demonstrated success in hyper-parameter optimization problems. However, it encounters challenges when optimizing categorical variables in the presence of interaction between continuous and categorical variables in the objective function. In this paper, we focus on optimizing mixed binary-continuous variables as a special case and identify two types of variable interactions that make the problem particularly challenging for CatCMA. To address these difficulties, we propose two algorithmic components: a warm-starting strategy and a hyper-representation technique. We analyze their theoretical impact on test problems exhibiting these interaction properties. Empirical results demonstrate that the proposed components effectively address the identified challenges, and CatCMA enhanced with these components, named ICatCMA, outperforms the original CatCMA.
Vulnerability Mitigation for Safety-Aligned Language Models via Debiasing
Feb 04, 2025Safety alignment is an essential research topic for real-world AI applications. Despite the multifaceted nature of safety and trustworthiness in AI, current safety alignment methods often focus on a comprehensive notion of safety. By carefully assessing models from the existing safety-alignment methods, we found that, while they generally improved overall safety performance, they failed to ensure safety in specific categories. Our study first identified the difficulty of eliminating such vulnerabilities without sacrificing the model's helpfulness. We observed that, while smaller KL penalty parameters, increased training iterations, and dataset cleansing can enhance safety, they do not necessarily improve the trade-off between safety and helpfulness. We discovered that safety alignment could even induce undesired effects and result in a model that prefers generating negative tokens leading to rejective responses, regardless of the input context. To address this, we introduced a learning-free method, Token-level Safety-Debiased Inference (TSDI), to estimate and correct this bias during the generation process using randomly constructed prompts. Our experiments demonstrated that our method could enhance the model's helpfulness while maintaining safety, thus improving the trade-off Pareto-front.
Probabilistic Prediction of Ship Maneuvering Motion using Ensemble Learning with Feedforward Neural Networks
Nov 30, 2024
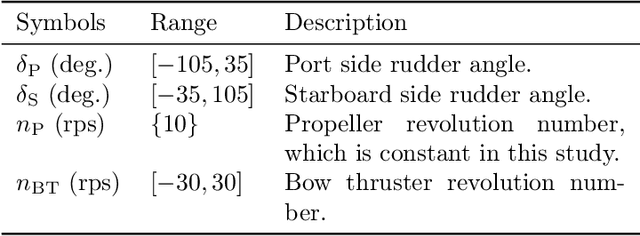
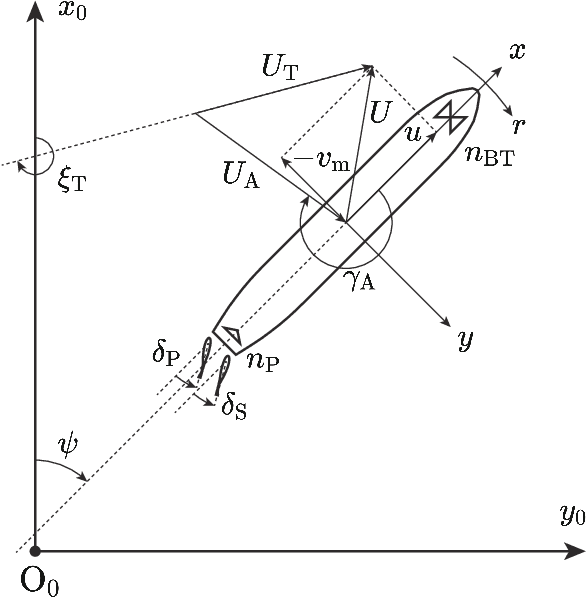
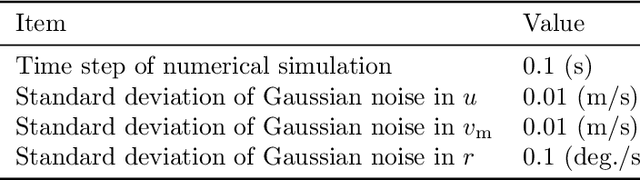
In the field of Maritime Autonomous Surface Ships (MASS), the accurate modeling of ship maneuvering motion for harbor maneuvers is a crucial technology. Non-parametric system identification (SI) methods, which do not require prior knowledge of the target ship, have the potential to produce accurate maneuvering models using observed data. However, the modeling accuracy significantly depends on the distribution of the available data. To address these issues, we propose a probabilistic prediction method of maneuvering motion that incorporates ensemble learning into a non-parametric SI using feedforward neural networks. This approach captures the epistemic uncertainty caused by insufficient or unevenly distributed data. In this paper, we show the prediction accuracy and uncertainty prediction results for various unknown scenarios, including port navigation, zigzag, turning, and random control maneuvers, assuming that only port navigation data is available. Furthermore, this paper demonstrates the utility of the proposed method as a maneuvering simulator for assessing heading-keeping PD control. As a result, it was confirmed that the proposed method can achieve high accuracy if training data with similar state distributions is provided, and that it can also predict high uncertainty for states that deviate from the training data distribution. In the performance evaluation of PD control, it was confirmed that considering worst-case scenarios reduces the possibility of overestimating performance compared to the true system. Finally, we show the results of applying the proposed method to full-scale ship data, demonstrating its applicability to full-scale ships.
Conceptual Design on the Field of View of Celestial Navigation Systems for Maritime Autonomous Surface Ships
Aug 28, 2024



In order to understand the appropriate field of view (FOV) size of celestial automatic navigation systems for surface ships, we investigate the variations of measurement accuracy of star position and probability of successful star identification with respect to FOV, focusing on the decreasing number of observable star magnitudes and the presence of physically covered stars in marine environments. The results revealed that, although a larger FOV reduces the measurement accuracy of star positions, it increases the number of observable objects and thus improves the probability of star identification using subgraph isomorphism-based methods. It was also found that, although at least four objects need to be observed for accurate identification, four objects may not be sufficient for wider FOVs. On the other hand, from the point of view of celestial navigation systems, a decrease in the measurement accuracy leads to a decrease in positioning accuracy. Therefore, it was found that maximizing the FOV is required for celestial automatic navigation systems as long as the desired positioning accuracy can be ensured. Furthermore, it was found that algorithms incorporating more than four observed celestial objects are required to achieve highly accurate star identification over a wider FOV.
Tail Bounds on the Runtime of Categorical Compact Genetic Algorithm
Jul 10, 2024



The majority of theoretical analyses of evolutionary algorithms in the discrete domain focus on binary optimization algorithms, even though black-box optimization on the categorical domain has a lot of practical applications. In this paper, we consider a probabilistic model-based algorithm using the family of categorical distributions as its underlying distribution and set the sample size as two. We term this specific algorithm the categorical compact genetic algorithm (ccGA). The ccGA can be considered as an extension of the compact genetic algorithm (cGA), which is an efficient binary optimization algorithm. We theoretically analyze the dependency of the number of possible categories $K$, the number of dimensions $D$, and the learning rate $\eta$ on the runtime. We investigate the tail bound of the runtime on two typical linear functions on the categorical domain: categorical OneMax (COM) and KVal. We derive that the runtimes on COM and KVal are $O(\sqrt{D} \ln (DK) / \eta)$ and $\Theta(D \ln K/ \eta)$ with high probability, respectively. Our analysis is a generalization for that of the cGA on the binary domain.