 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion in Your Way: Aligning Image Fusion with Heterogeneous Demands via Direct Preference Optimization
May 07, 2026As a key technique in multi-modal processing, infrared and visible image fusion (IVIF) plays a crucial role in integrating complementary spectral information for visual enhancement and downstream vision tasks. Despite remarkable progress, existing methods struggle to flexibly accommodate heterogeneous demands. Achieving adaptive fusion that aligns with various preferences from both human and machine vision remains an open and challenging problem. To address this challenge, we propose DPOFusion, a direct preference optimization (DPO) framework integrating the property-aligned latent diffusion model (PALDM) and the preference-controllable latent diffusion model (PCLDM), enabling task-guided, preference-adaptive IVIF for both human and machine vision. The PALDM leverages a latent fusion prior and a joint conditional loss to generate diverse candidate fusion results with various properties. PCLDM is subsequently fine-tuned via instance direct preference optimization (IDPO), enabling direct control of the final fusion results with heterogeneous preference signals. Experimental results demonstrate that our framework not only attains precise preference alignment among humans, vision-language models, and task-driven networks, but also sets a new benchmark for adaptive fusion quality and task-oriented transferability.
An Efficient End-to-End 3D Model Reconstruction based on Neural Architecture Search
Mar 01, 2022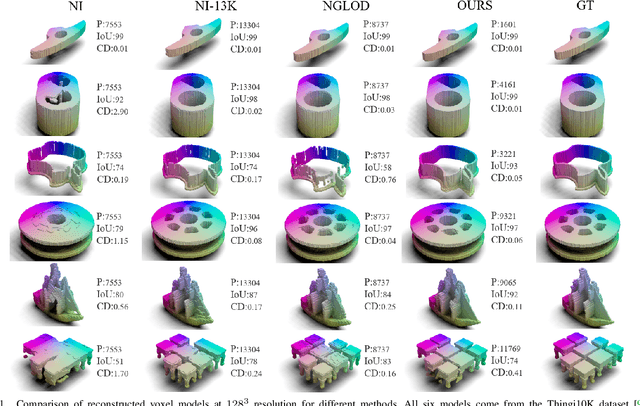
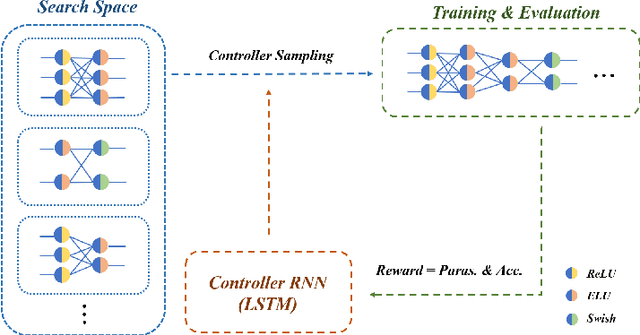
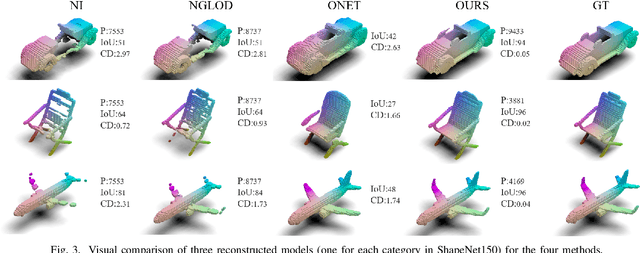
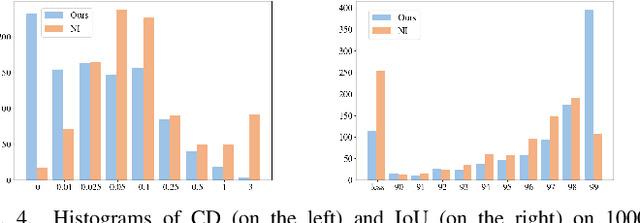
Using neural networks to represent 3D objects has become popular. However, many previous works employ neural networks with fixed architecture and size to represent different 3D objects, which lead to excessive network parameters for simple objects and limited reconstruction accuracy for complex objects. For each 3D model, it is desirable to have an end-to-end neural network with as few parameters as possible to achieve high-fidelity reconstruction. In this paper, we propose an efficient model reconstruction method utilizing neural architecture search (NAS) and binary classification. Taking the number of layers, the number of nodes in each layer, and the activation function of each layer as the search space, a specific network architecture can be obtained based on reinforcement learning technology. Furthermore, to get rid of the traditional surface reconstruction algorithms (e.g., marching cube) used after network inference, we complete the end-to-end network by classifying binary voxels. Compared to other signed distance field (SDF) prediction or binary classification networks, our method achieves significantly higher reconstruction accuracy using fewer network parameters.