 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-based SLAM for robotic mapping: state of the art and new frontiers
Nov 01, 2023



In recent decades, the field of robotic mapping has witnessed widespread research and development in LiDAR (Light Detection And Ranging)-based simultaneous localization and mapping (SLAM) techniques. In this paper, we review the state-of-the-art in LiDAR-based SLAM and explore the remaining challenges that still require attention to satisfy the needs of contemporary applications. A distinctive aspect of this study lies in its literature survey, which specifically investigates the application of various types and configurations of LiDAR, setting it apart from prior reviews. Furthermore, several representative comparisons of LiDAR-based SLAM algorithms are presented, which can serve as a point of reference. Finally, the paper concludes with an insightful discussion on the emergence of new frontiers in the domain of LiDAR-based SLAM.
Measuring Similarity of Interactive Driving Behaviors Using Matrix Profile
Nov 03, 2019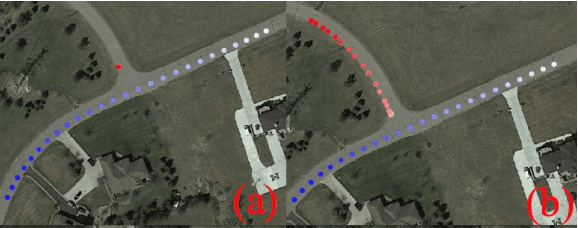
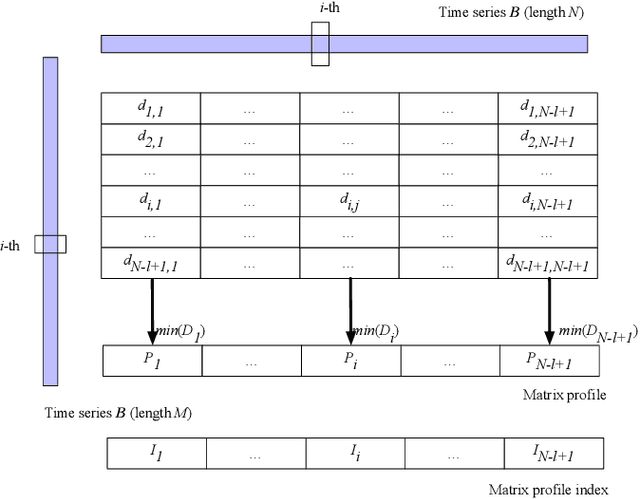
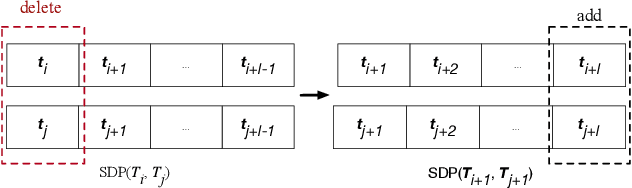
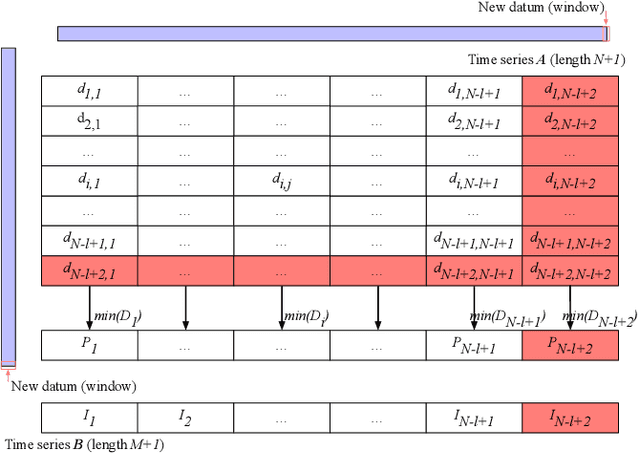
Understanding multi-vehicle interactive behaviors with temporal sequential observations is crucial for autonomous vehicles to make appropriate decisions in an uncertain traffic environment. On-demand similarity measures are significant for autonomous vehicles to deal with massive interactive driving behaviors by clustering and classifying diverse scenarios. This paper proposes a general approach for measuring spatiotemporal similarity of interactive behaviors using a multivariate matrix profile technique. The key attractive features of the approach are its superior space and time complexity, real-time online computing for streaming traffic data, and possible capability of leveraging hardware for parallel computation. The proposed approach is validated through automatically discovering similar interactive driving behaviors at intersections from sequential data.