 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing Smooth Geodesics under Two-Sided Curvature Bounds with Applications to Robotics and Image Analysis
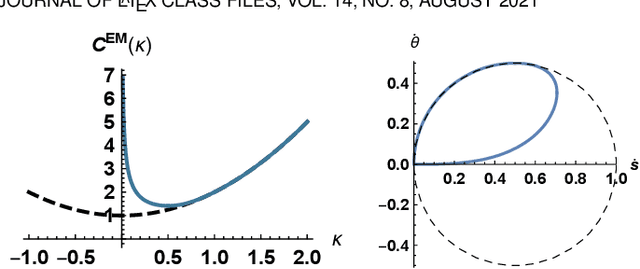
Jun 11, 2026Curvature of planar curves serves as a key regularization term for computing second-order minimal paths, due to its tight relevance to desirable geometric properties such as smoothness, rigidity, and elasticity. In this paper, we tackle a more challenging problem in computational physics and geometry problem: tracking minimal paths whose curvature is constrained by arbitrary upper and lower bounds. For that purpose, we propose a new curvature-bounded geodesic model, developed under the Hamilton-Jacobi-Bellman (HJB) partial differential equation (PDE) framework. It provides strong geometric control over minimal paths by enforcing curvature range constraints, whose paths are smooth and of bounded curvature limitation. We also present a discretization scheme for the Hamiltonian and the HJB PDE incorporating curvature bounds, allowing efficient solver for estimating numerical solutions to the model. Finally, we illustrate the capability of the proposed curvature-bounded geodesic model in applications of robot path planning and curvilinear structures tracking from images. Numerical experiments demonstrate that the proposed curvature-bounded geodesic model serves as a powerful and robust tool for finding satisfactory paths.
Geodesic Models with Convexity Shape Prior
Nov 01, 2021

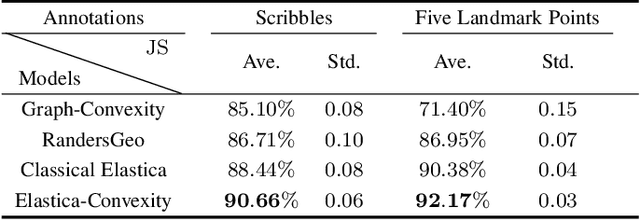
The minimal geodesic models based on the Eikonal equations are capable of finding suitable solutions in various image segmentation scenarios. Existing geodesic-based segmentation approaches usually exploit image features in conjunction with geometric regularization terms, such as Euclidean curve length or curvature-penalized length, for computing geodesic curves. In this paper, we take into account a more complicated problem: finding curvature-penalized geodesic paths with a convexity shape prior. We establish new geodesic models relying on the strategy of orientation-lifting, by which a planar curve can be mapped to an high-dimensional orientation-dependent space. The convexity shape prior serves as a constraint for the construction of local geodesic metrics encoding a particular curvature constraint. Then the geodesic distances and the corresponding closed geodesic paths in the orientation-lifted space can be efficiently computed through state-of-the-art Hamiltonian fast marching method. In addition, we apply the proposed geodesic models to the active contours, leading to efficient interactive image segmentation algorithms that preserve the advantages of convexity shape prior and curvature penalization.