 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous computing platform for real-time robotics
Jan 13, 2026After Industry 4.0 has embraced tight integration between machinery (OT), software (IT), and the Internet, creating a web of sensors, data, and algorithms in service of efficient and reliable production, a new concept of Society 5.0 is emerging, in which infrastructure of a city will be instrumented to increase reliability, efficiency, and safety. Robotics will play a pivotal role in enabling this vision that is pioneered by the NEOM initiative - a smart city, co-inhabited by humans and robots. In this paper we explore the computing platform that will be required to enable this vision. We show how we can combine neuromorphic computing hardware, exemplified by the Loihi2 processor used in conjunction with event-based cameras, for sensing and real-time perception and interaction with a local AI compute cluster (GPUs) for high-level language processing, cognition, and task planning. We demonstrate the use of this hybrid computing architecture in an interactive task, in which a humanoid robot plays a musical instrument with a human. Central to our design is the efficient and seamless integration of disparate components, ensuring that the synergy between software and hardware maximizes overall performance and responsiveness. Our proposed system architecture underscores the potential of heterogeneous computing architectures in advancing robotic autonomy and interactive intelligence, pointing toward a future where such integrated systems become the norm in complex, real-time applications.
Low-Power Low-Latency Keyword Spotting and Adaptive Control with a SpiNNaker 2 Prototype and Comparison with Loihi
Sep 18, 2020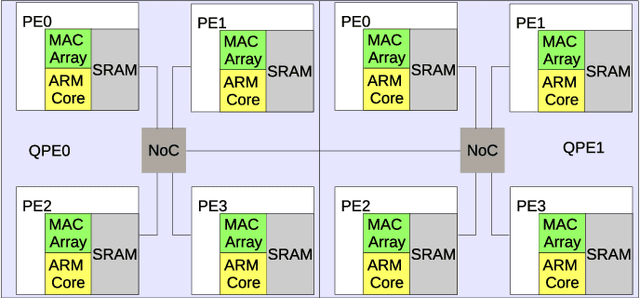
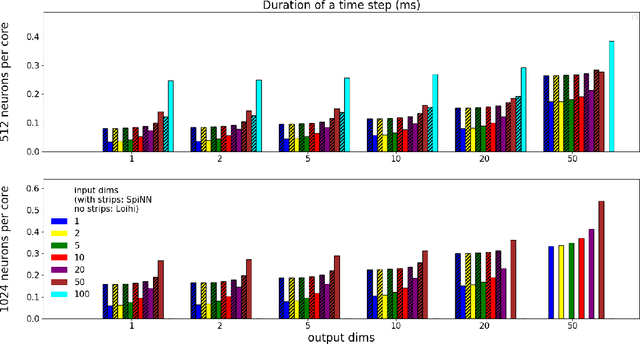
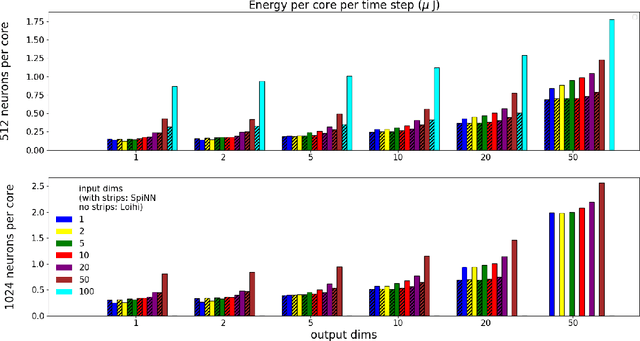
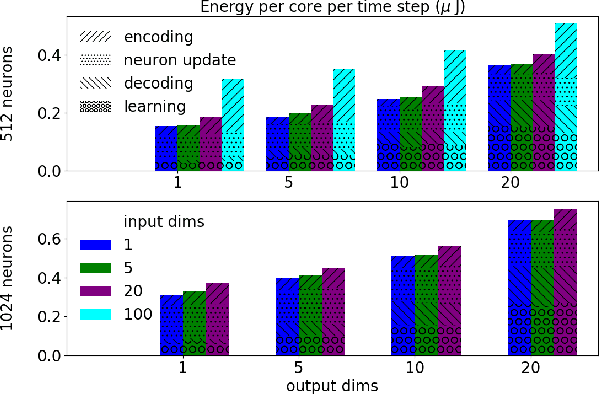
We implemented two neural network based benchmark tasks on a prototype chip of the second-generation SpiNNaker (SpiNNaker 2) neuromorphic system: keyword spotting and adaptive robotic control. Keyword spotting is commonly used in smart speakers to listen for wake words, and adaptive control is used in robotic applications to adapt to unknown dynamics in an online fashion. We highlight the benefit of a multiply accumulate (MAC) array in the SpiNNaker 2 prototype which is ordinarily used in rate-based machine learning networks when employed in a neuromorphic, spiking context. In addition, the same benchmark tasks have been implemented on the Loihi neuromorphic chip, giving a side-by-side comparison regarding power consumption and computation time. While Loihi shows better efficiency when less complicated vector-matrix multiplication is involved, with the MAC array, the SpiNNaker 2 prototype shows better efficiency when high dimensional vector-matrix multiplication is involved.
Benchmarking Keyword Spotting Efficiency on Neuromorphic Hardware
Dec 04, 2018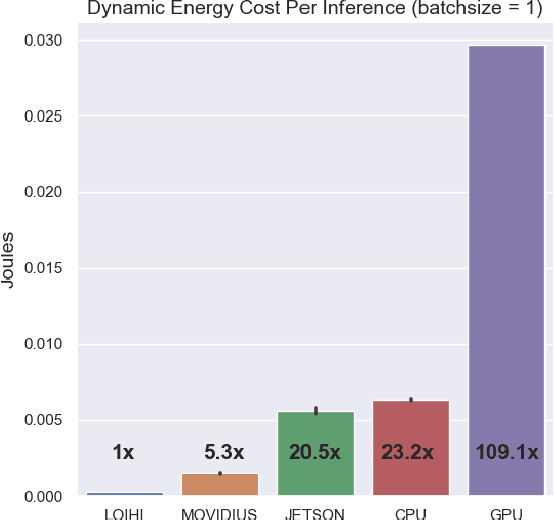
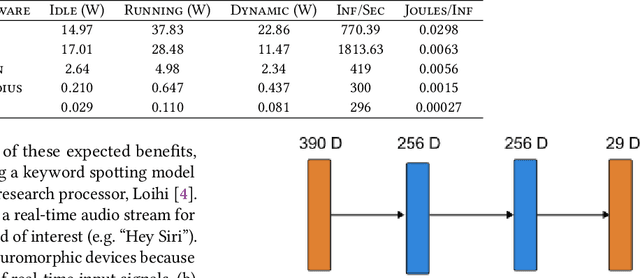

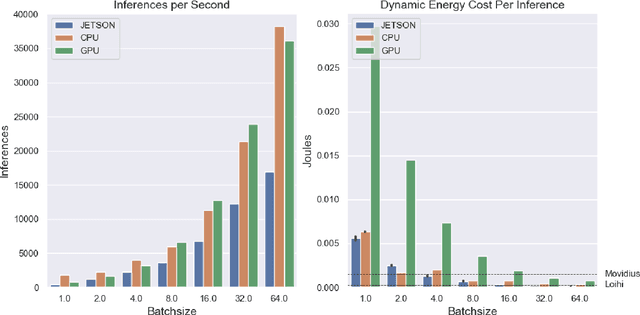
Using Intel's Loihi neuromorphic research chip and ABR's Nengo Deep Learning toolkit, we analyze the inference speed, dynamic power consumption, and energy cost per inference of a two-layer neural network keyword spotter trained to recognize a single phrase. We perform comparative analyses of this keyword spotter running on more conventional hardware devices including a CPU, a GPU, Nvidia's Jetson TX1, and the Movidius Neural Compute Stick. Our results indicate that for this inference application, Loihi outperforms all of these alternatives on an energy cost per inference basis while maintaining near-equivalent inference accuracy. Furthermore, an analysis of tradeoffs between network size, inference speed, and energy cost indicates that Loihi's comparative advantage over other low-power computing devices improves for larger networks.
BioSpaun: A large-scale behaving brain model with complex neurons
Feb 16, 2016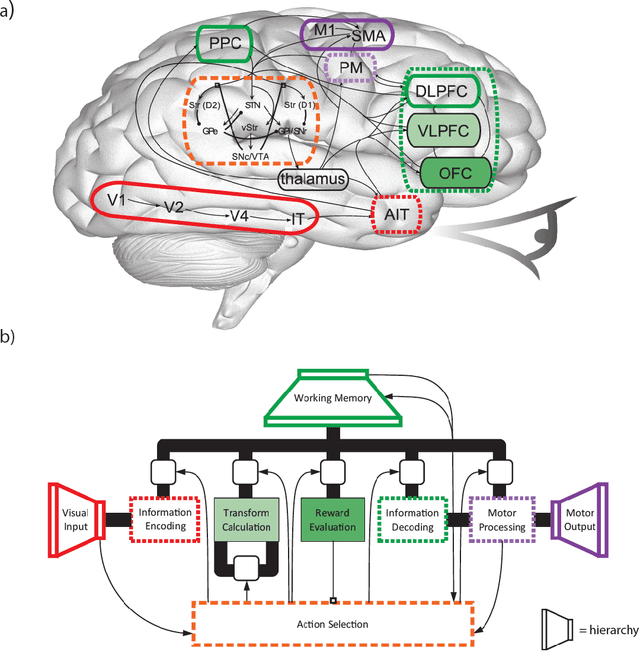
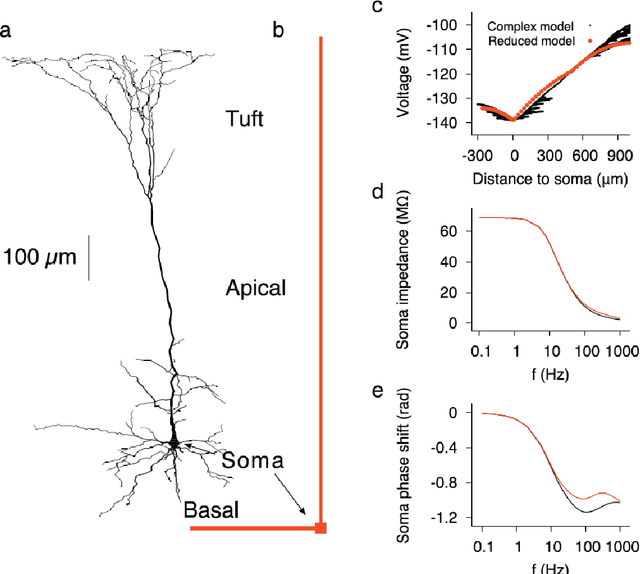
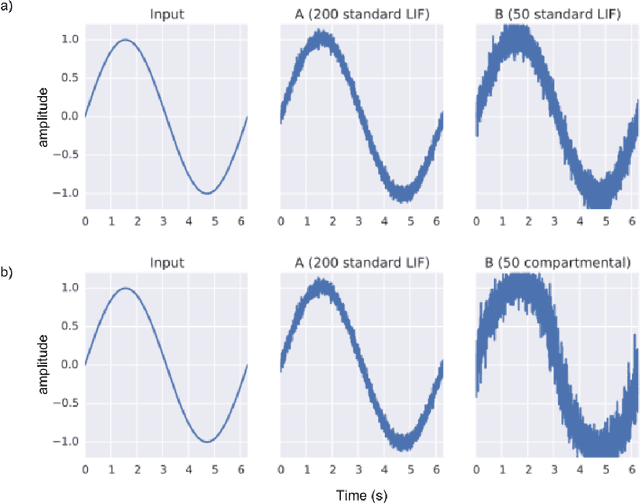
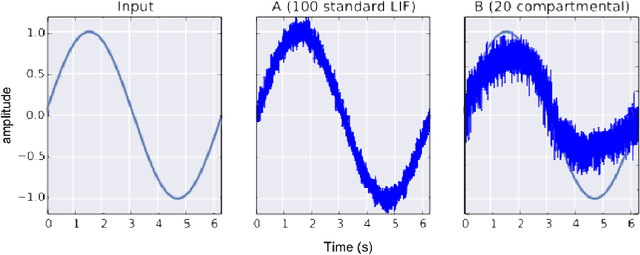
We describe a large-scale functional brain model that includes detailed, conductance-based, compartmental models of individual neurons. We call the model BioSpaun, to indicate the increased biological plausibility of these neurons, and because it is a direct extension of the Spaun model \cite{Eliasmith2012b}. We demonstrate that including these detailed compartmental models does not adversely affect performance across a variety of tasks, including digit recognition, serial working memory, and counting. We then explore the effects of applying TTX, a sodium channel blocking drug, to the model. We characterize the behavioral changes that result from this molecular level intervention. We believe this is the first demonstration of a large-scale brain model that clearly links low-level molecular interventions and high-level behavior.