 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Diagnostics of Continuous Normalizing Flow for Out-of-Distribution Detection
May 30, 2026We address the problem of out-of-distribution (OOD) detection for target observations embedded in a subspace of the high dimensional data space. Using continuous normalizing flows (CNFs), we propose a Lagrangian sub-flow (LSF) framework designed to isolate and estimate the density for the relevant components in the representation and using the remaining components as context. Through experimentation with models for speech synthesis, we show that CNFs, similarly to other deep generative models (DGMs), are susceptible to the "likelihood paradox", where high likelihood is erroneously assigned to OOD samples. This is attributed to the inductive bias of DGMs that prioritize low-level structural details over high-level semantic coherence. To mitigate this phenomenon, we propose a number of geometric diagnostic signals based on the velocity field over the sub-flow trajectory. Based on these signals, we design metrics for the challenging task of zero-shot phoneme-level mispronunciation detection. Finally, we demonstrate the superiority of these metrics compared to likelihood-based methods on a real-world mispronunciation detection benchmark.
A Survey on Blockchain Technology and Its Potential Applications in Distributed Control and Cooperative Robots
Dec 20, 2018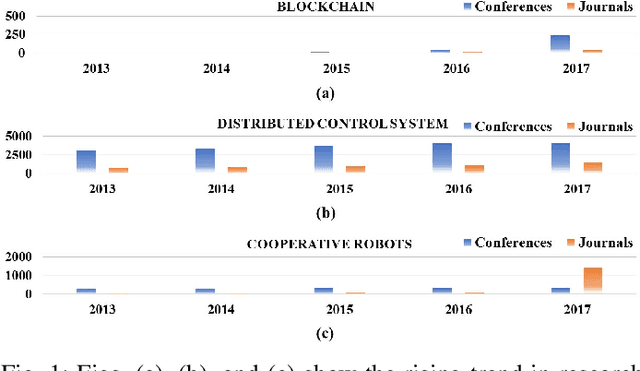
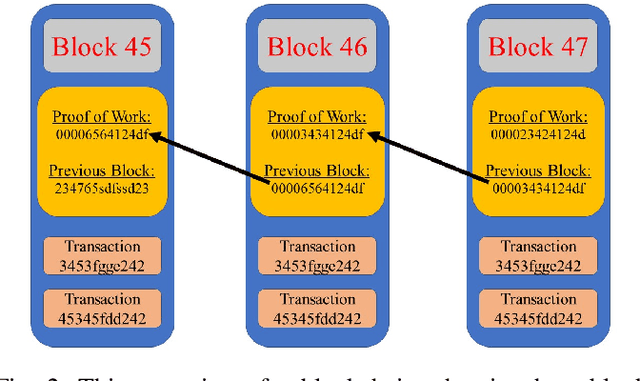
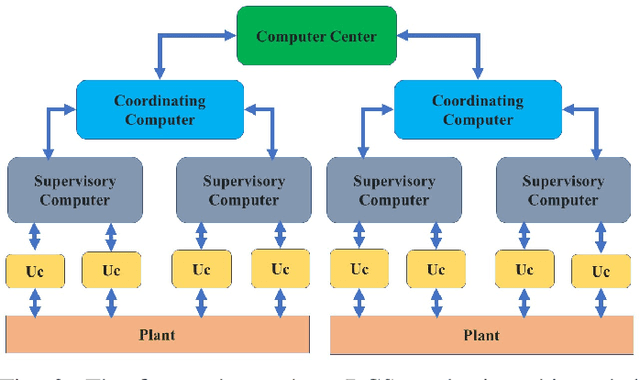
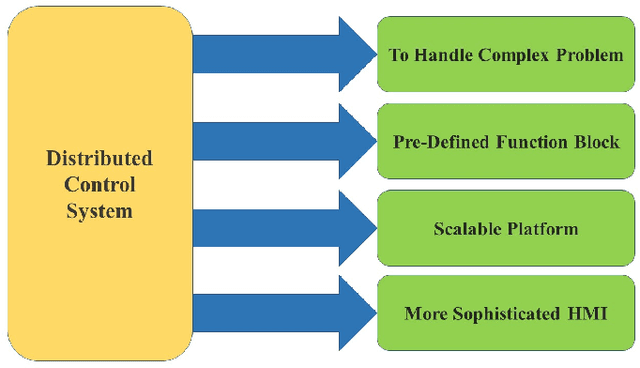
As a disruptive technology, blockchain, particularly its original form of bitcoin as a type of digital currency, has attracted great attentions. The innovative distributed decision making and security mechanism lay the technical foundation for its success, making us consider to penetrate the power of blockchain technology to distributed control and cooperative robotics, in which the distributed and secure mechanism is also highly demanded. Actually, security and distributed communication have long been unsolved problems in the field of distributed control and cooperative robotics. It has been reported on the network failure and intruder attacks of distributed control and multi-robotic systems. Blockchain technology provides promise to remedy this situation thoroughly. This work is intended to create a global picture of blockchain technology on its working principle and key elements in the language of control and robotics, to provide a shortcut for beginners to step into this research field.