 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStretchBot: A Neuro-Symbolic Framework for Adaptive Guidance with Assistive Robots
Apr 01, 2026Assistive robots have growing potential to support physical wellbeing in home and healthcare settings, for example, by guiding users through stretching or rehabilitation routines. However, existing systems remain largely scripted, which limits their ability to adapt to user state, environmental context, and interaction dynamics. In this work, we present StretchBot, a hybrid neuro-symbolic robotic coach for adaptive assistive guidance. The system combines multimodal perception with knowledge-graph-grounded large language model reasoning to support context-aware adjustments during short stretching sessions while maintaining a structured routine. To complement the system description, we report an exploratory pilot comparison between scripted and adaptive guidance with three participants. The pilot findings suggest that the adaptive condition improved perceived adaptability and contextual relevance, while scripted guidance remained competitive in smoothness and predictability. These results provide preliminary evidence that structured actionable knowledge can help ground language-model-based adaptation in embodied assistive interaction, while also highlighting the need for larger, longitudinal studies to evaluate robustness, generalizability, and long-term user experience.
COT Flow: Learning Optimal-Transport Image Sampling and Editing by Contrastive Pairs
Jun 17, 2024Diffusion models have demonstrated strong performance in sampling and editing multi-modal data with high generation quality, yet they suffer from the iterative generation process which is computationally expensive and slow. In addition, most methods are constrained to generate data from Gaussian noise, which limits their sampling and editing flexibility. To overcome both disadvantages, we present Contrastive Optimal Transport Flow (COT Flow), a new method that achieves fast and high-quality generation with improved zero-shot editing flexibility compared to previous diffusion models. Benefiting from optimal transport (OT), our method has no limitation on the prior distribution, enabling unpaired image-to-image (I2I) translation and doubling the editable space (at both the start and end of the trajectory) compared to other zero-shot editing methods. In terms of quality, COT Flow can generate competitive results in merely one step compared to previous state-of-the-art unpaired image-to-image (I2I) translation methods. To highlight the advantages of COT Flow through the introduction of OT, we introduce the COT Editor to perform user-guided editing with excellent flexibility and quality. The code will be released at https://github.com/zuxinrui/cot_flow.
Deep Recursive Embedding for High-Dimensional Data
Oct 31, 2021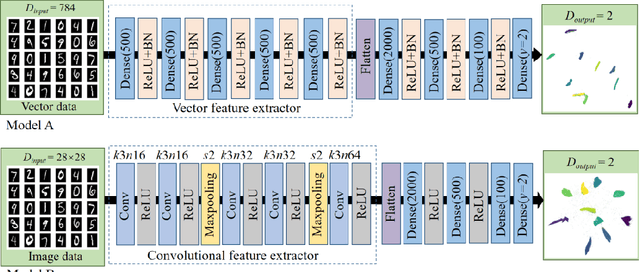
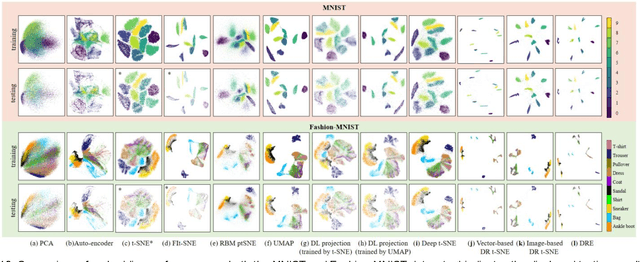
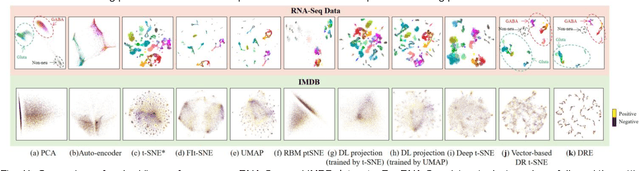
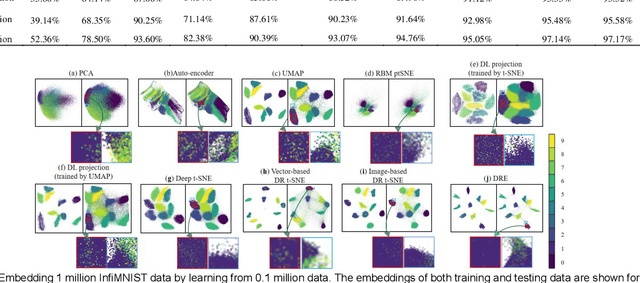
Embedding high-dimensional data onto a low-dimensional manifold is of both theoretical and practical value. In this paper, we propose to combine deep neural networks (DNN) with mathematics-guided embedding rules for high-dimensional data embedding. We introduce a generic deep embedding network (DEN) framework, which is able to learn a parametric mapping from high-dimensional space to low-dimensional space, guided by well-established objectives such as Kullback-Leibler (KL) divergence minimization. We further propose a recursive strategy, called deep recursive embedding (DRE), to make use of the latent data representations for boosted embedding performance. We exemplify the flexibility of DRE by different architectures and loss functions, and benchmarked our method against the two most popular embedding methods, namely, t-distributed stochastic neighbor embedding (t-SNE) and uniform manifold approximation and projection (UMAP). The proposed DRE method can map out-of-sample data and scale to extremely large datasets. Experiments on a range of public datasets demonstrated improved embedding performance in terms of local and global structure preservation, compared with other state-of-the-art embedding methods.
* arXiv admin note: substantial text overlap with arXiv:2104.05171