 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMineRobot: A Unified Framework for Kinematics Modeling and Solving of Underground Mining Robots in Virtual Environments
Mar 23, 2026Underground mining robots are increasingly operated in virtual environments (VEs) for training, planning, and digital-twin applications, where reliable kinematics is essential for avoiding hazardous in-situ trials. Unlike typical open-chain industrial manipulators, mining robots are often closed-chain mechanisms driven by linear actuators and involving planar four-bar linkages, which makes both kinematics modeling and real-time solving challenging. We present \emph{MineRobot}, a unified framework for modeling and solving the kinematics of underground mining robots in VEs. First, we introduce the Mining Robot Description Format (MRDF), a domain-specific representation that parameterizes kinematics for mining robots with native semantics for actuators and loop closures. Second, we develop a topology-processing pipeline that contracts four-bar substructures into generalized joints and, for each actuator, extracts an Independent Topologically Equivalent Path (ITEP), which is classified into one of four canonical types. Third, leveraging ITEP independence, we compose per-type solvers into an actuator-centered sequential forward-kinematics (FK) pipeline. Building on the same decomposition, we formulate inverse kinematics (IK) as a bound-constrained optimization problem and solve it with a Gauss--Seidel-style procedure that alternates actuator-length updates. By converting coupled closed-loop kinematics into a sequence of small topology-aware solves, the framework avoids robot-specific hand derivations and supports efficient computation. Experiments demonstrate that MineRobot provides the real-time performance and robustness required by VE applications.
Interactive Physically-Based Simulation of Roadheader Robot
Jun 29, 2022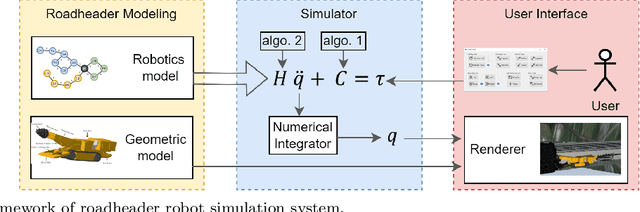
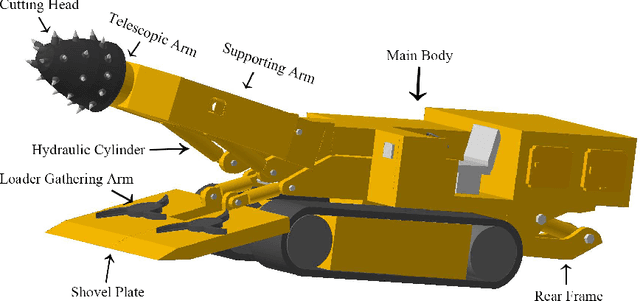
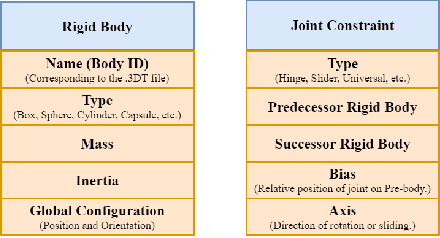
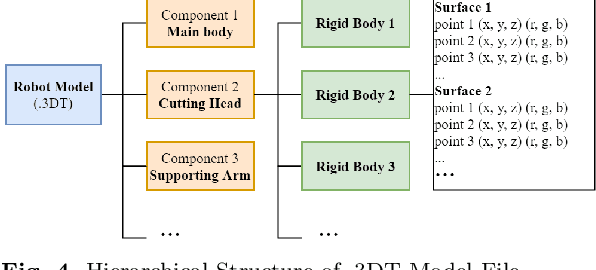
Roadheader is an engineering robot widely used in underground engineering and mining industry. Interactive dynamics simulation of roadheader is a fundamental problem in unmanned excavation and virtual reality training. However, current research is only based on traditional animation techniques or commercial game engines. There are few studies that apply real-time physical simulation of computer graphics to the field of roadheader robot. This paper aims to present an interactive physically-based simulation system of roadheader robot. To this end, an improved multibody simulation method based on generalized coordinates is proposed. First, our simulation method describes robot dynamics based on generalized coordinates. Compared to state-of-the-art methods, our method is more stable and accurate. Numerical simulation results showed that our method has significantly less error than the game engine in the same number of iterations. Second, we adopt the symplectic Euler integrator instead of the conventional fourth-order Runge-Kutta (RK4) method for dynamics iteration. Compared with other integrators, our method is more stable in energy drift during long-term simulation. The test results showed that our system achieved real-time interaction performance of 60 frames per second (fps). Furthermore, we propose a model format for geometric and robotics modeling of roadheaders to implement the system. Our interactive simulation system of roadheader meets the requirements of interactivity, accuracy and stability.