 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping Mid-air Haptics with a Low-cost Tactile Robot
Jul 04, 2022



Mid-air haptics create a new mode of feedback to allow people to feel tactile sensations in the air. Ultrasonic arrays focus acoustic radiation pressure in space, to induce tactile sensation from the resulting skin deflection. In this work, we present a low-cost tactile robot to test mid-air haptics. By combining a desktop robot arm with a 3D-printed biomimetic tactile sensor, we developed a system that can sense, map, and visualize mid-air haptic sensations created by an ultrasonic transducer array. We evaluate our tactile robot by testing it on a variety of mid-air haptic stimuli, including unmodulated and modulated focal points that create a range of haptic shapes. We compare the mapping of the stimuli to another method used to test mid-air haptics: Laser Doppler Vibrometry, highlighting the advantages of the tactile robot including far lower cost, a small lightweight form-factor, and ease-of-use. Overall, these findings indicate our method has multiple benefits for sensing mid-air haptics and opens up new possibilities for expanding the testing to better emulate human haptic perception.
Pulsed Schlieren Imaging of Ultrasonic Haptics and Levitation using Phased Arrays
Sep 29, 2018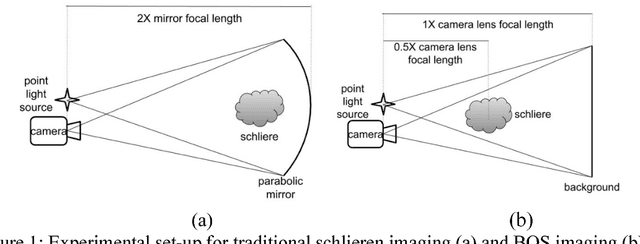
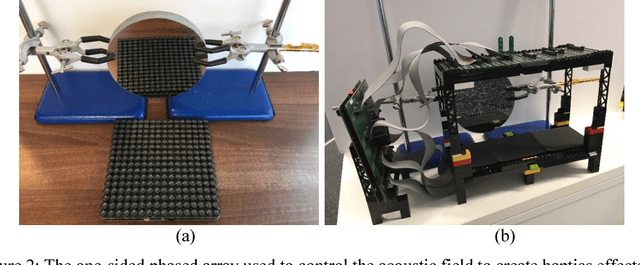
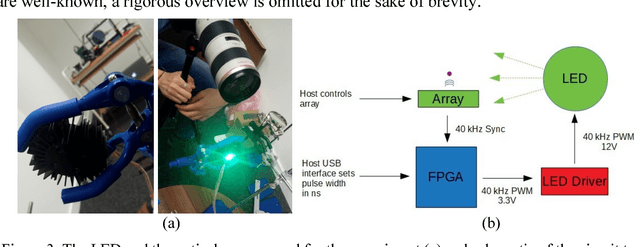
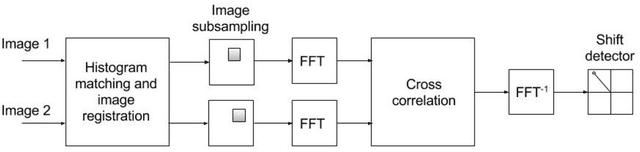
Ultrasonic acoustic fields have recently been used to generate haptic effects on the human skin as well as to levitate small sub-wavelength size particles. Schlieren imaging and background-oriented schlieren techniques can be used for acoustic wave pattern and beam shape visualization. These techniques exploit variations in the refractive index of a propagation medium by applying refractive optics or cross-correlation algorithms of photographs of illuminated background patterns. Here both background-oriented and traditional schlieren systems are used to visualize the regions of the acoustic power involved in creating dynamic haptic sensations and dynamic levitation traps. We demonstrate for the first time the application of back-ground-oriented schlieren for imaging ultrasonic fields in air. We detail our imaging apparatus and present improved algorithms used to visualize these phenomena that we have produced using multiple phased arrays. Moreover, to improve imaging, we leverage an electronically controlled, high-output LED which is pulsed in synchrony with the ultrasonic carrier frequency.