 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAcoustoBots: A swarm of robots for acoustophoretic multimodal interactions
May 12, 2025Acoustophoresis has enabled novel interaction capabilities, such as levitation, volumetric displays, mid-air haptic feedback, and directional sound generation, to open new forms of multimodal interactions. However, its traditional implementation as a singular static unit limits its dynamic range and application versatility. This paper introduces AcoustoBots - a novel convergence of acoustophoresis with a movable and reconfigurable phased array of transducers for enhanced application versatility. We mount a phased array of transducers on a swarm of robots to harness the benefits of multiple mobile acoustophoretic units. This offers a more flexible and interactive platform that enables a swarm of acoustophoretic multimodal interactions. Our novel AcoustoBots design includes a hinge actuation system that controls the orientation of the mounted phased array of transducers to achieve high flexibility in a swarm of acoustophoretic multimodal interactions. In addition, we designed a BeadDispenserBot that can deliver particles to trapping locations, which automates the acoustic levitation interaction. These attributes allow AcoustoBots to independently work for a common cause and interchange between modalities, allowing for novel augmentations (e.g., a swarm of haptics, audio, and levitation) and bilateral interactions with users in an expanded interaction area. We detail our design considerations, challenges, and methodological approach to extend acoustophoretic central control in distributed settings. This work demonstrates a scalable acoustic control framework with two mobile robots, laying the groundwork for future deployment in larger robotic swarms. Finally, we characterize the performance of our AcoustoBots and explore the potential interactive scenarios they can enable.
Reconfigurable Intelligent Surfaces and Machine Learning for Wireless Fingerprinting Localization
Oct 07, 2020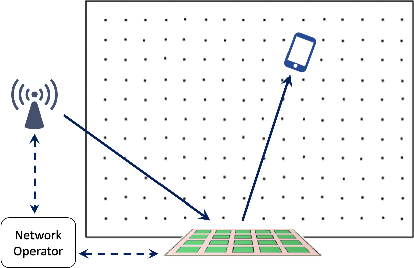
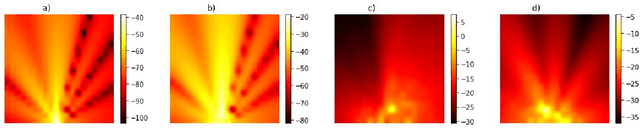
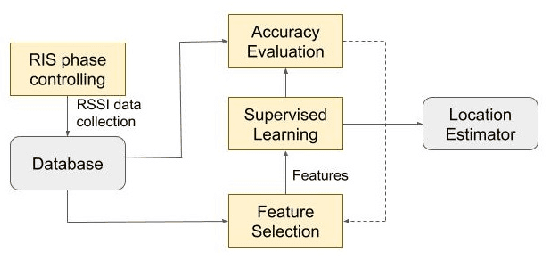
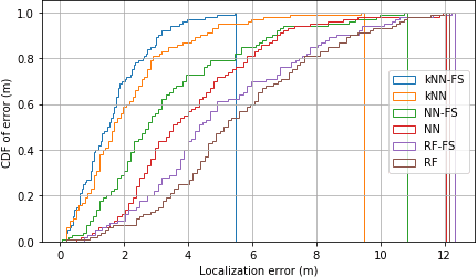
Reconfigurable Intelligent Surfaces (RISs) promise improved, secure and more efficient wireless communications. We propose and demonstrate how to exploit the diversity offered by RISs to generate and select easily differentiable radio maps for use in wireless fingerprinting localization applications. Further, we apply machine learning feature selection methods to prune the large state space of the RIS, thus reducing complexity and enhancing localization accuracy and position acquisition time. We evaluate our proposed approach by generation of radio maps with a novel radio propagation modelling and simulations.
Pulsed Schlieren Imaging of Ultrasonic Haptics and Levitation using Phased Arrays
Sep 29, 2018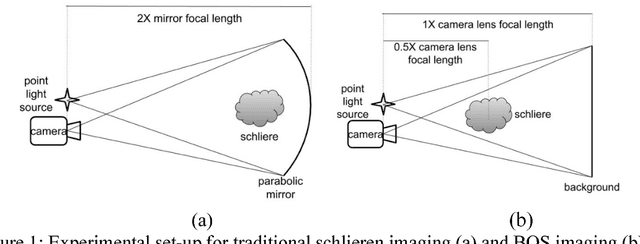
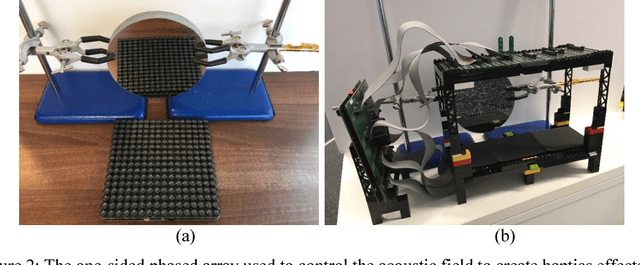
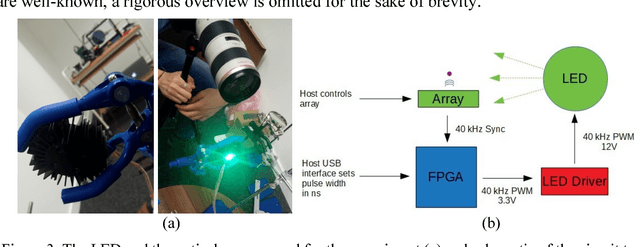
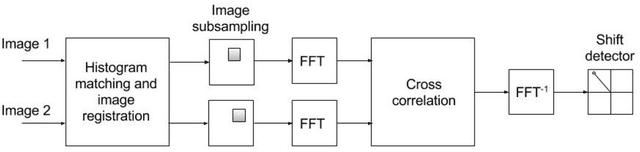
Ultrasonic acoustic fields have recently been used to generate haptic effects on the human skin as well as to levitate small sub-wavelength size particles. Schlieren imaging and background-oriented schlieren techniques can be used for acoustic wave pattern and beam shape visualization. These techniques exploit variations in the refractive index of a propagation medium by applying refractive optics or cross-correlation algorithms of photographs of illuminated background patterns. Here both background-oriented and traditional schlieren systems are used to visualize the regions of the acoustic power involved in creating dynamic haptic sensations and dynamic levitation traps. We demonstrate for the first time the application of back-ground-oriented schlieren for imaging ultrasonic fields in air. We detail our imaging apparatus and present improved algorithms used to visualize these phenomena that we have produced using multiple phased arrays. Moreover, to improve imaging, we leverage an electronically controlled, high-output LED which is pulsed in synchrony with the ultrasonic carrier frequency.