 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRule-Based Spatial Mixture-of-Experts U-Net for Explainable Edge Detection
Feb 04, 2026Deep learning models like U-Net and its variants, have established state-of-the-art performance in edge detection tasks and are used by Generative AI services world-wide for their image generation models. However, their decision-making processes remain opaque, operating as "black boxes" that obscure the rationale behind specific boundary predictions. This lack of transparency is a critical barrier in safety-critical applications where verification is mandatory. To bridge the gap between high-performance deep learning and interpretable logic, we propose the Rule-Based Spatial Mixture-of-Experts U-Net (sMoE U-Net). Our architecture introduces two key innovations: (1) Spatially-Adaptive Mixture-of-Experts (sMoE) blocks integrated into the decoder skip connections, which dynamically gate between "Context" (smooth) and "Boundary" (sharp) experts based on local feature statistics; and (2) a Takagi-Sugeno-Kang (TSK) Fuzzy Head that replaces the standard classification layer. This fuzzy head fuses deep semantic features with heuristic edge signals using explicit IF-THEN rules. We evaluate our method on the BSDS500 benchmark, achieving an Optimal Dataset Scale (ODS) F-score of 0.7628, effectively matching purely deep baselines like HED (0.7688) while outperforming the standard U-Net (0.7437). Crucially, our model provides pixel-level explainability through "Rule Firing Maps" and "Strategy Maps," allowing users to visualize whether an edge was detected due to strong gradients, high semantic confidence, or specific logical rule combinations.
Fuzzy-RRT for Obstacle Avoidance in a 2-DOF Semi-Autonomous Surgical Robotic Arm
Apr 24, 2025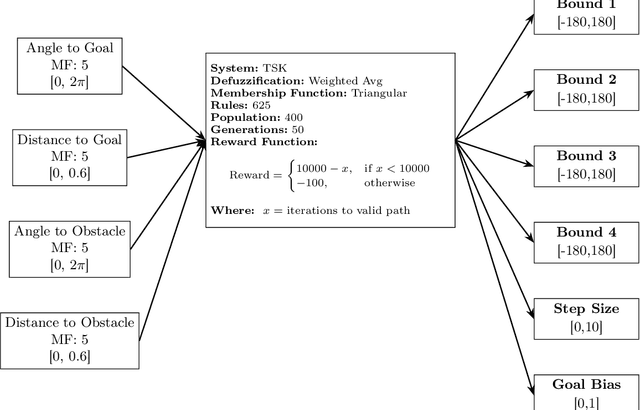



AI-driven semi-autonomous robotic surgery is essential for addressing the medical challenges of long-duration interplanetary missions, where limited crew sizes and communication delays restrict traditional surgical approaches. Current robotic surgery systems require full surgeon control, demanding extensive expertise and limiting feasibility in space. We propose a novel adaptation of the Fuzzy Rapidly-exploring Random Tree algorithm for obstacle avoidance and collaborative control in a two-degree-of-freedom robotic arm modeled on the Miniaturized Robotic-Assisted surgical system. It was found that the Fuzzy Rapidly-exploring Random Tree algorithm resulted in an 743 percent improvement to path search time and 43 percent improvement to path cost.
A Genetic Fuzzy-Enabled Framework on Robotic Manipulation for In-Space Servicing
Apr 21, 2025



Automation of robotic systems for servicing in cislunar space is becoming extremely important as the number of satellites in orbit increases. Safety is critical in performing satellite maintenance, so the control techniques utilized must be trusted in addition to being highly efficient. In this work, Genetic Fuzzy Trees are combined with the widely used LQR control scheme via Thales' TrUE AI Toolkit to create a trusted and efficient controller for a two-degree-of-freedom planar robotic manipulator that would theoretically be used to perform satellite maintenance. It was found that Genetic Fuzzy-LQR is 18.5% more performant than optimal LQR on average, and that it is incredibly robust to uncertainty.