 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact Status Recognition and Slip Detection with a Bio-inspired Tactile Hand
Mar 19, 2026Stable and reliable grasp is critical to robotic manipulations especially for fragile and glazed objects, where the grasp force requires precise control as too large force possibly damages the objects while small force leads to slip and fall-off. Although it is assumed the objects to manipulate is grasped firmly in advance, slip detection and timely prevention are necessary for a robot in unstructured and universal environments. In this work, we addressed this issue by utilizing multimodal tactile feedback from a five-fingered bio-inspired hand. Motivated by human hands, the tactile sensing elements were distributed and embedded into the soft skin of robotic hand, forming 24 tactile channels in total. Different from the threshold method that was widely employed in most existing works, we converted the slip detection problem to contact status recognition in combination with binning technique first and then detected the slip onset time according to the recognition results. After the 24-channel tactile signals passed through discrete wavelet transform, 17 features were extracted from different time and frequency bands. With the optimal 120 features employed for status recognition, the test accuracy reached 96.39% across three different sliding speeds and six kinds of materials. When applied to four new unseen materials, a high accuracy of 91.95% was still achieved, which further validated the generalization of our proposed method. Finally, the performance of slip detection is verified based on the trained model of contact status recognition.
Tactile Recognition of Both Shapes and Materials with Automatic Feature Optimization-Enabled Meta Learning
Mar 09, 2026Tactile perception is indispensable for robots to implement various manipulations dexterously, especially in contact-rich scenarios. However, alongside the development of deep learning techniques, it meanwhile suffers from training data scarcity and a time-consuming learning process in practical applications since the collection of a large amount of tactile data is costly and sometimes even impossible. Hence, we propose an automatic feature optimization-enabled prototypical network to realize meta-learning, i.e., AFOP-ML framework. As a ``learn to learn" network, it not only adapts to new unseen classes rapidly with few-shot, but also learns how to determine the optimal feature space automatically. Based on the four-channel signals acquired from a tactile finger, both shapes and materials are recognized. On a 36-category benchmark, it outperforms several existing approaches by attaining an accuracy of 96.08% in 5-way-1-shot scenario, where only 1 example is available for training. It still remains 88.7% in the extreme 36-way-1-shot case. The generalization ability is further validated through three groups of experiment involving unseen shapes, materials and force/speed perturbations. More insights are additionally provided by this work for the interpretation of recognition tasks and improved design of tactile sensors.
Crystal structure prediction of materials with high symmetry using differential evolution
Apr 20, 2021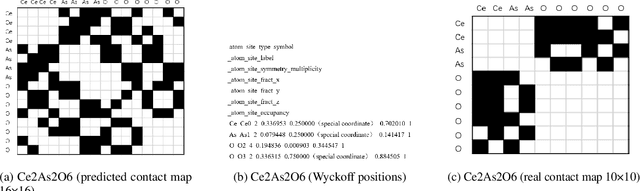
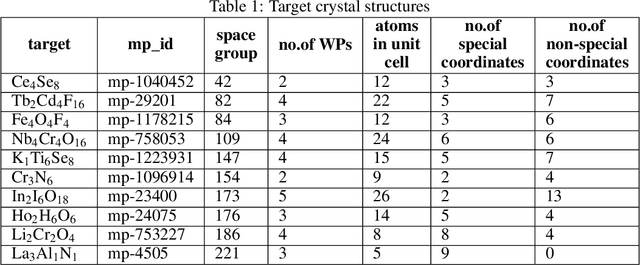
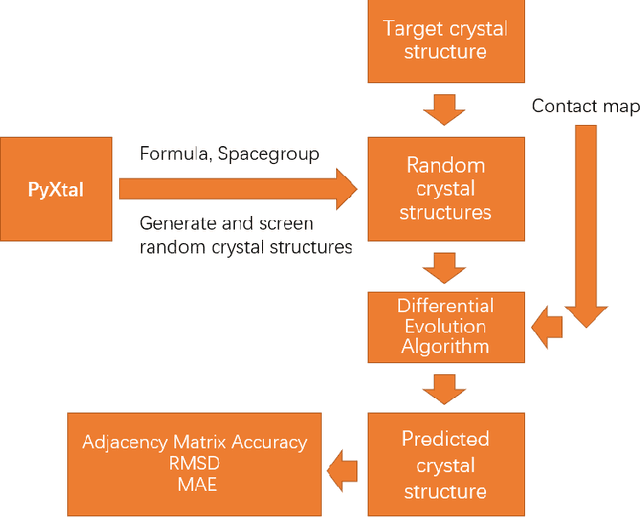
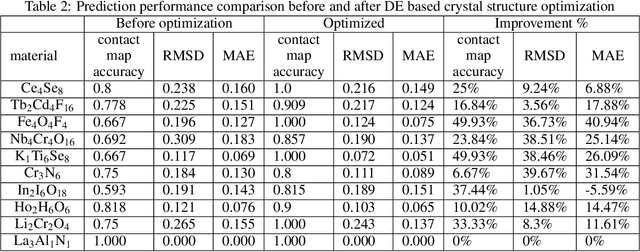
Crystal structure determines properties of materials. With the crystal structure of a chemical substance, many physical and chemical properties can be predicted by first-principles calculations or machine learning models. Since it is relatively easy to generate a hypothetical chemically valid formula, crystal structure prediction becomes an important method for discovering new materials. In our previous work, we proposed a contact map-based crystal structure prediction method, which uses global optimization algorithms such as genetic algorithms to maximize the match between the contact map of the predicted structure and the contact map of the real crystal structure to search for the coordinates at the Wyckoff Positions(WP). However, when predicting the crystal structure with high symmetry, we found that the global optimization algorithm has difficulty to find an effective combination of WPs that satisfies the chemical formula, which is mainly caused by the inconsistency between the dimensionality of the contact map of the predicted crystal structure and the dimensionality of the contact map of the target crystal structure. This makes it challenging to predict the crystal structures of high-symmetry crystals. In order to solve this problem, here we propose to use PyXtal to generate and filter random crystal structures with given symmetry constraints based on the information such as chemical formulas and space groups. With contact map as the optimization goal, we use differential evolution algorithms to search for non-special coordinates at the Wyckoff positions to realize the structure prediction of high-symmetry crystal materials. Our experimental results show that our proposed algorithm CMCrystalHS can effectively solve the problem of inconsistent contact map dimensions and predict the crystal structures with high symmetry.