 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioinspired Kirigami Capsule Robot for Minimally Invasive Gastrointestinal Biopsy
Feb 05, 2026Wireless capsule endoscopy (WCE) has transformed gastrointestinal (GI) diagnostics by enabling noninvasive visualization of the digestive tract, yet its diagnostic yield remains constrained by the absence of biopsy capability, as histological analysis is still the gold standard for confirming disease. Conventional biopsy using forceps, needles, or rotating blades is invasive, limited in reach, and carries risks of perforation or mucosal trauma, while fluid- or microbiota-sampling capsules cannot provide structured tissue for pathology, leaving a critical gap in swallowable biopsy solutions. Here we present the Kiri-Capsule, a kirigami-inspired capsule robot that integrates deployable PI-film flaps actuated by a compact dual-cam mechanism to achieve minimally invasive and repeatable tissue collection. The kirigami surface remains flat during locomotion but transforms into sharp protrusions upon cam-driven stretching, enabling controlled penetration followed by rotary scraping, with specimens retained in internal fan-shaped cavities. Bench tests confirmed that PI films exhibit a Young's modulus of approximately 20 MPa and stable deployment angles (about 34$^\circ$ at 15% strain), while ex vivo porcine studies demonstrated shallow penetration depths (median $\sim$0.61 mm, range 0.46--0.66 mm) and biopsy yields comparable to standard forceps (mean $\sim$10.9 mg for stomach and $\sim$18.9 mg for intestine), with forces within safe ranges reported for GI biopsy. These findings demonstrate that the Kiri-Capsule bridges passive imaging and functional biopsy, providing a swallowable, depth-controlled, and histology-ready solution that advances capsule-based diagnostics toward safe and effective clinical application.
RASEC: Rescaling Acquisition Strategy with Energy Constraints under SE-OU Fusion Kernel for Active Trachea Palpation and Incision Recommendation in Laryngeal Region
Nov 12, 2021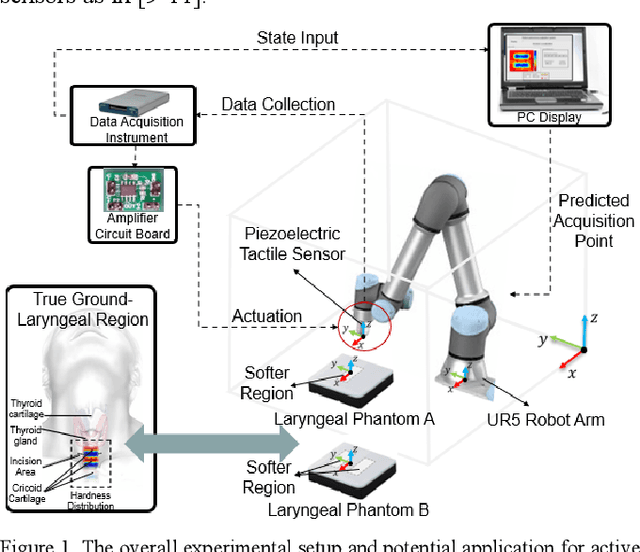
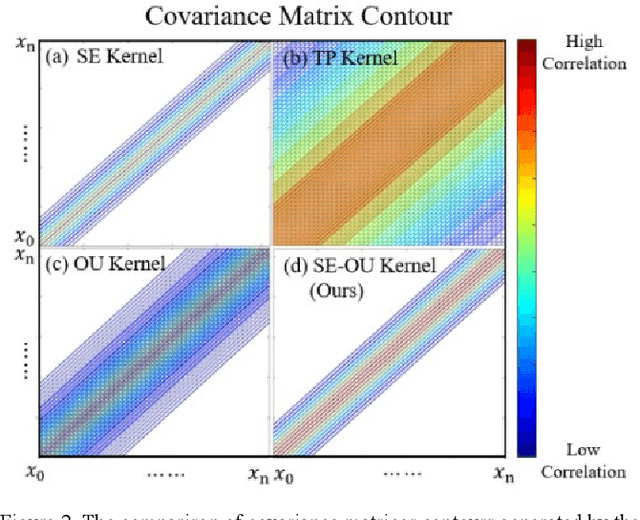
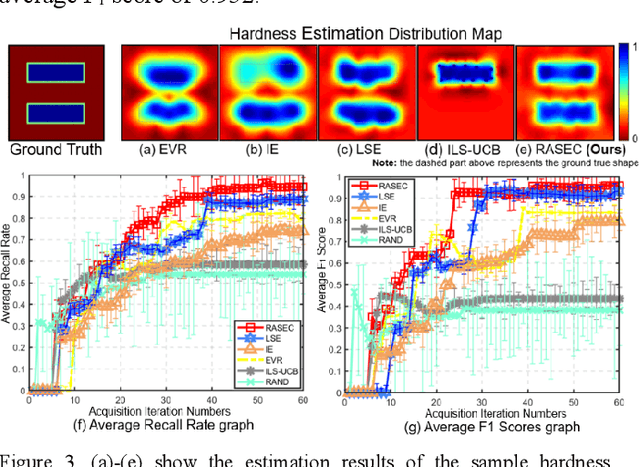
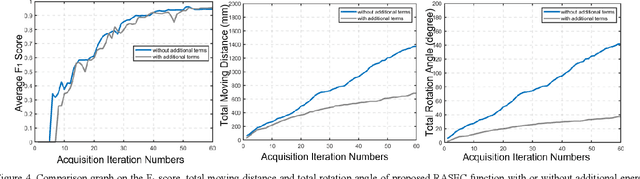
A novel palpation-based incision detection strategy in the laryngeal region, potentially for robotic tracheotomy, is proposed in this letter. A tactile sensor is introduced to measure tissue hardness in the specific laryngeal region by gentle contact. The kernel fusion method is proposed to combine the Squared Exponential (SE) kernel with Ornstein-Uhlenbeck (OU) kernel to figure out the drawbacks that the existing kernel functions are not sufficiently optimal in this scenario. Moreover, we further regularize exploration factor and greed factor, and the tactile sensor's moving distance and the robotic base link's rotation angle during the incision localization process are considered as new factors in the acquisition strategy. We conducted simulation and physical experiments to compare the newly proposed algorithm - Rescaling Acquisition Strategy with Energy Constraints (RASEC) in trachea detection with current palpation-based acquisition strategies. The result indicates that the proposed acquisition strategy with fusion kernel can successfully localize the incision with the highest algorithm performance (Average Precision 0.932, Average Recall 0.973, Average F1 score 0.952). During the robotic palpation process, the cumulative moving distance is reduced by 50%, and the cumulative rotation angle is reduced by 71.4% with no sacrifice in the comprehensive performance capabilities. Therefore, it proves that RASEC can efficiently suggest the incision zone in the laryngeal region and greatly reduced the energy loss.