 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJustified or Just Convincing? Error Verifiability as a Dimension of LLM Quality
Apr 06, 2026As LLMs are deployed in high-stakes settings, users must judge the correctness of individual responses, often relying on model-generated justifications such as reasoning chains or explanations. Yet, no standard measure exists for whether these justifications help users distinguish correct answers from incorrect ones. We formalize this idea as error verifiability and propose $v_{\text{bal}}$, a balanced metric that measures whether justifications enable raters to accurately assess answer correctness, validated against human raters who show high agreement. We find that neither common approaches, such as post-training and model scaling, nor more targeted interventions recommended improve verifiability. We introduce two methods that succeed at improving verifiability: reflect-and-rephrase (RR) for mathematical reasoning and oracle-rephrase (OR) for factual QA, both of which improve verifiability by incorporating domain-appropriate external information. Together, our results establish error verifiability as a distinct dimension of response quality that does not emerge from accuracy improvements alone and requires dedicated, domain-aware methods to address.
Ultrafast High-Flux Single-Photon LiDAR Simulator via Neural Mapping
May 29, 2025Efficient simulation of photon registrations in single-photon LiDAR (SPL) is essential for applications such as depth estimation under high-flux conditions, where hardware dead time significantly distorts photon measurements. However, the conventional wisdom is computationally intensive due to their inherently sequential, photon-by-photon processing. In this paper, we propose a learning-based framework that accelerates the simulation process by modeling the photon count and directly predicting the photon registration probability density function (PDF) using an autoencoder (AE). Our method achieves high accuracy in estimating both the total number of registered photons and their temporal distribution, while substantially reducing simulation time. Extensive experiments validate the effectiveness and efficiency of our approach, highlighting its potential to enable fast and accurate SPL simulations for data-intensive imaging tasks in the high-flux regime.
Joint Depth and Reflectivity Estimation using Single-Photon LiDAR
May 19, 2025Single-Photon Light Detection and Ranging (SP-LiDAR is emerging as a leading technology for long-range, high-precision 3D vision tasks. In SP-LiDAR, timestamps encode two complementary pieces of information: pulse travel time (depth) and the number of photons reflected by the object (reflectivity). Existing SP-LiDAR reconstruction methods typically recover depth and reflectivity separately or sequentially use one modality to estimate the other. Moreover, the conventional 3D histogram construction is effective mainly for slow-moving or stationary scenes. In dynamic scenes, however, it is more efficient and effective to directly process the timestamps. In this paper, we introduce an estimation method to simultaneously recover both depth and reflectivity in fast-moving scenes. We offer two contributions: (1) A theoretical analysis demonstrating the mutual correlation between depth and reflectivity and the conditions under which joint estimation becomes beneficial. (2) A novel reconstruction method, "SPLiDER", which exploits the shared information to enhance signal recovery. On both synthetic and real SP-LiDAR data, our method outperforms existing approaches, achieving superior joint reconstruction quality.
Analysis and Improvement of Rank-Ordered Mean Algorithm in Single-Photon LiDAR
Jul 29, 2024Depth estimation using a single-photon LiDAR is often solved by a matched filter. It is, however, error-prone in the presence of background noise. A commonly used technique to reject background noise is the rank-ordered mean (ROM) filter previously reported by Shin \textit{et al.} (2015). ROM rejects noisy photon arrival timestamps by selecting only a small range of them around the median statistics within its local neighborhood. Despite the promising performance of ROM, its theoretical performance limit is unknown. In this paper, we theoretically characterize the ROM performance by showing that ROM fails when the reflectivity drops below a threshold predetermined by the depth and signal-to-background ratio, and its accuracy undergoes a phase transition at the cutoff. Based on our theory, we propose an improved signal extraction technique by selecting tight timestamp clusters. Experimental results show that the proposed algorithm improves depth estimation performance over ROM by 3 orders of magnitude at the same signal intensities, and achieves high image fidelity at noise levels as high as 17 times that of signal.
Parametric Modeling and Estimation of Photon Registrations for 3D Imaging
Jul 02, 2024In single-photon light detection and ranging (SP-LiDAR) systems, the histogram distortion due to hardware dead time fundamentally limits the precision of depth estimation. To compensate for the dead time effects, the photon registration distribution is typically modeled based on the Markov chain self-excitation process. However, this is a discrete process and it is computationally expensive, thus hindering potential neural network applications and fast simulations. In this paper, we overcome the modeling challenge by proposing a continuous parametric model. We introduce a Gaussian-uniform mixture model (GUMM) and periodic padding to address high noise floors and noise slopes respectively. By deriving and implementing a customized expectation maximization (EM) algorithm, we achieve accurate histogram matching in scenarios that were deemed difficult in the literature.
Resolution Limit of Single-Photon LiDAR
Mar 31, 2024



Single-photon Light Detection and Ranging (LiDAR) systems are often equipped with an array of detectors for improved spatial resolution and sensing speed. However, given a fixed amount of flux produced by the laser transmitter across the scene, the per-pixel Signal-to-Noise Ratio (SNR) will decrease when more pixels are packed in a unit space. This presents a fundamental trade-off between the spatial resolution of the sensor array and the SNR received at each pixel. Theoretical characterization of this fundamental limit is explored. By deriving the photon arrival statistics and introducing a series of new approximation techniques, the Mean Squared Error (MSE) of the maximum-likelihood estimator of the time delay is derived. The theoretical predictions align well with simulations and real data.
Etymo: A New Discovery Engine for AI Research
Jan 25, 2018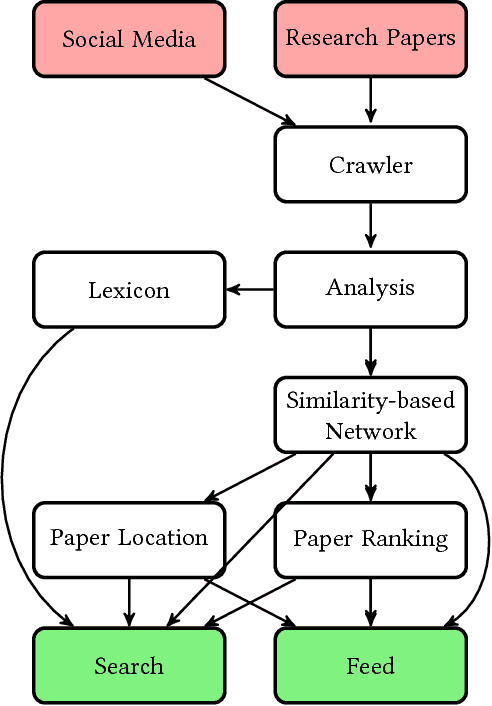
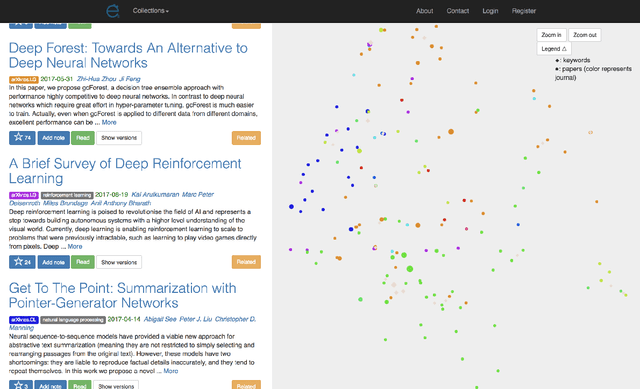
We present Etymo (https://etymo.io), a discovery engine to facilitate artificial intelligence (AI) research and development. It aims to help readers navigate a large number of AI-related papers published every week by using a novel form of search that finds relevant papers and displays related papers in a graphical interface. Etymo constructs and maintains an adaptive similarity-based network of research papers as an all-purpose knowledge graph for ranking, recommendation, and visualisation. The network is constantly evolving and can learn from user feedback to adjust itself.