 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCup Rescue 2025 Team Description Paper UruBots
Apr 14, 2025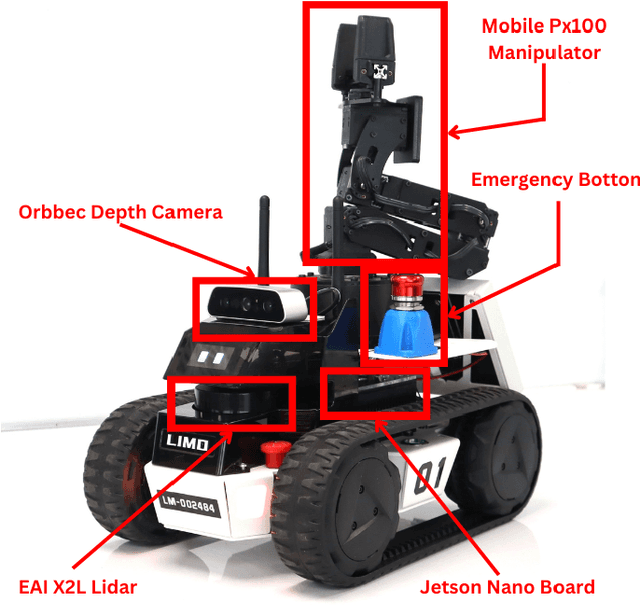
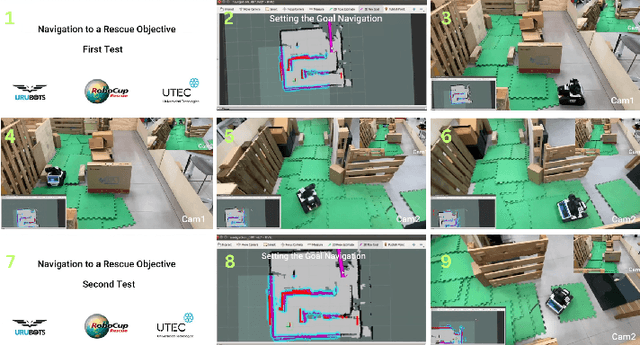
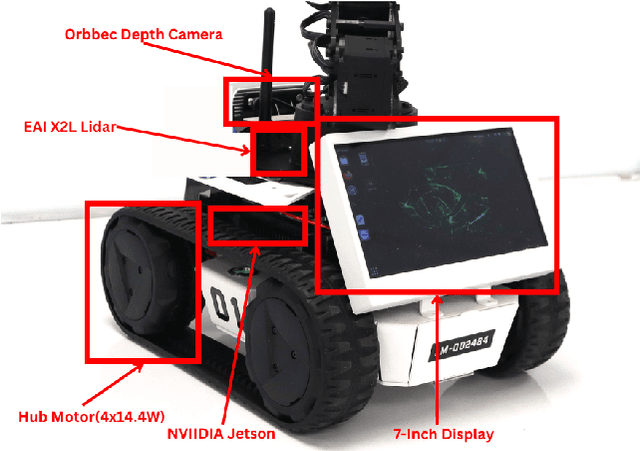
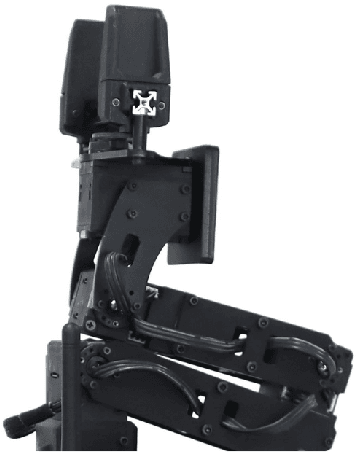
This paper describes the approach used by Team UruBots for participation in the 2025 RoboCup Rescue Robot League competition. Our team aims to participate for the first time in this competition at RoboCup, using experience learned from previous competitions and research. We present our vehicle and our approach to tackle the task of detecting and finding victims in search and rescue environments. Our approach contains known topics in robotics, such as ROS, SLAM, Human Robot Interaction and segmentation and perception. Our proposed approach is open source, available to the RoboCup Rescue community, where we aim to learn and contribute to the league.
UruBots Autonomous Cars Team One Description Paper for FIRA 2024
Jun 13, 2024This document presents the design of an autonomous car developed by the UruBots team for the 2024 FIRA Autonomous Cars Race Challenge. The project involves creating an RC-car sized electric vehicle capable of navigating race tracks with in an autonomous manner. It integrates mechanical and electronic systems alongside artificial intelligence based algorithms for the navigation and real-time decision-making. The core of our project include the utilization of an AI-based algorithm to learn information from a camera and act in the robot to perform the navigation. We show that by creating a dataset with more than five thousand samples and a five-layered CNN we managed to achieve promissing performance we our proposed hardware setup. Overall, this paper aims to demonstrate the autonomous capabilities of our car, highlighting its readiness for the 2024 FIRA challenge, helping to contribute to the field of autonomous vehicle research.