 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdmittance Controller Complemented with Real-time Singularity Avoidance for Rehabilitation Parallel Robots
Jan 17, 2024Rehabilitation tasks demand robust and accurate trajectory-tracking performance, mainly achieved with parallel robots. In this field, limiting the value of the force exerted on the patient is crucial, especially when an injured limb is involved. In human-robot interaction studies, the admittance controller modifies the location of the robot according to the user efforts driving the end-effector to an arbitrary location within the workspace. However, a parallel robot has singularities within the workspace, making implementing a conventional admittance controller unsafe. Thus, this study proposes an admittance controller that overcomes the limitations of singular configurations by using a real-time singularity avoidance algorithm. The singularity avoidance algorithm modifies the original trajectory based on the actual location of the parallel robot. The complemented admittance controller is applied to a 4 degrees of freedom parallel robot for knee rehabilitation. In this case, the actual location is measured by a 3D tracking system because the location calculated by the forward kinematics is inaccurate in the vicinity of a singularity. The experimental results verify the effectiveness of the proposed admittance controller for safe knee rehabilitation exercises
A Type II Singularity Avoidance Algorithm for Parallel Manipulators using Output Twist Screws
Jan 17, 2024Parallel robots (PRs) are closed-chain manipulators with diverse applications due to their accuracy and high payload. However, there are configurations within the workspace named Type II singularities where the PRs lose control of the end-effector movements. Type II singularities are a problem for applications where complete control of the end-effector is essential. Trajectory planning produces accurate movements of a PR by avoiding Type II singularities. Generally, singularity avoidance is achieved by optimising a geometrical path with a velocity profile considering singular configurations as obstacles. This research presents an algorithm that avoids Type II singularities by modifying the trajectory of a subset of the actuators. The subset of actuators represents the limbs responsible for a Type II singularity, and they are identified by the angle between two Output Twist Screws. The proposed avoidance algorithm does not require optimisation procedures, which reduces the computational cost for offline trajectory planning and makes it suitable for online trajectory planning. The avoidance algorithm is implemented in offline trajectory planning for a pick and place planar PR and a spatial knee rehabilitation PR
Experimental Analysis of Type II Singularities and Assembly Change Points in a 3UPS+RPU Parallel Robot
Jan 16, 2024Parallel robots (PRs) have singular configurations where the robot gains at least one degree of freedom and loses control. Theoretically, such singularity occurs when the Forward Jacobian-matrix determinant becomes zero (Type II). However, actual PRs could lose control owing to Type II singularities for determinant values near zero, but not zero, because manufacturing tolerances introduce errors that are complex to model due to their low repeatability. Thus, using an actual 3UPS+RPU PR, this paper presents three contributions: i) a proximity detection index for Type II singularities based on the angle between two Output Twist Screws. The index can identify which kinematic chains contribute to the singularity. ii) an experimental benchmark to study Type II singularities. iii) PR configurations where the proposed index is zero and the Forward Jacobian determinant is not. In this last configuration, the findings show that the actual robot is unable to handle external actions applied to the PR.
Mechatronic Design, Experimental Setup and Control Architecture Design of a Novel 4 DoF Parallel Manipulator
Jan 16, 2024Although parallel manipulators (PMs) started with the introduction of architectures with 6 Degrees of Freedom (DoF), a vast number of applications require less than 6 DoF. Consequently, scholars have proposed architectures with 3 DoF and 4 DoF, but relatively few 4 DoF PMs have become prototypes, especially of the two rotation (2R) and two translation (2T) motion types. In this paper, we explain the mechatronics design, prototype and control architecture design of a 4 DoF PM with 2R2T motions. We chose to design a 4 DoF manipulator based on the motion needed to complete the tasks of lower limb rehabilitation. To the author's best knowledge, PMs between 3 and 6 DoF for rehabilitation of lower limbs have not been proposed to date. The developed architecture enhances the three minimum DoF required by adding a 4 DoF which allows combinations of normal or tangential efforts in the joints, or torque acting on the knee. We put forward the inverse and forward displacement equations, describe the prototype, perform the experimental setup, and develop the hardware and control architecture. The tracking accuracy experiments from the proposed controller show that the manipulator can accomplish the required application.
Drawbacks and alternatives to the numerical calculation of the base inertial parameters expressions for low mobility mechanisms
Jun 28, 2017
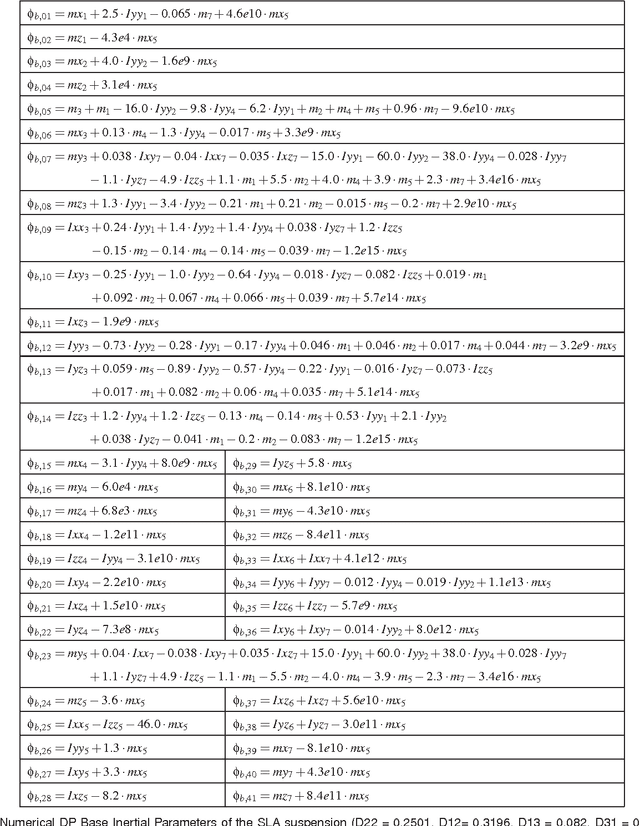
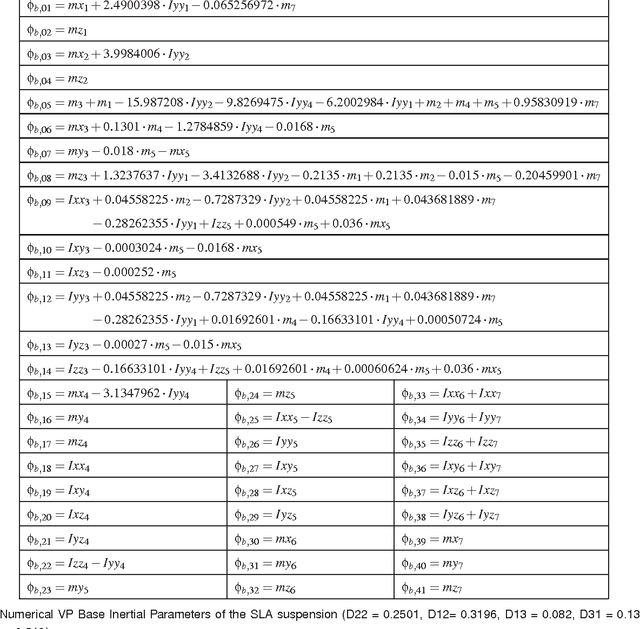
Base inertial parameters constitute a minimal inertial parametrization of mechanical systems that is of interest, for example, in parameter estimation and model reduction. Numerical and symbolic methods are available to determine their expressions. In this paper the problems associated with the numerical determination of the base inertial parameters expressions in the context of low mobility mechanisms are analyzed and discussed through and example. To circumvent these problems two alternatives are proposed: a variable precision arithmetic implementation of the customary numerical algorithm and the application of a general symbolic method. Finally, the advantages of both approaches compared to the numerical one are discussed in the context of the proposed low mobility example.
Simplification of multibody models by parameter reduction
May 29, 2017
Model selection methods are used in different scientific contexts to represent a characteristic data set in terms of a reduced number of parameters. Apparently, these methods have not found their way into the literature on multibody systems dynamics. Multibody models can be considered parametric models in terms of their dynamic parameters, and model selection techniques can then be used to express these models in terms of a reduced number of parameters. These parameter-reduced models are expected to have a smaller computational complexity than the original one and still preserve the desired level of accuracy. They are also known to be good candidates for parameter estimation purposes. In this work, simulations of the actual model are used to define a data set that is representative of the system's standard working conditions. A parameter-reduced model is chosen and its parameter values estimated so that they minimize the prediction error on these data. To that end, model selection heuristics and normalized error measures are proposed. Using this methodology, two multibody systems with very different characteristic mobility are analyzed. Highly considerable reductions in the number of parameters and computational cost are obtained without compromising the accuracy of the reduced model too much. As an additional result, a generalization of the base parameter concept to the context of parameter-reduced models is proposed.