 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrawbacks and alternatives to the numerical calculation of the base inertial parameters expressions for low mobility mechanisms
Jun 28, 2017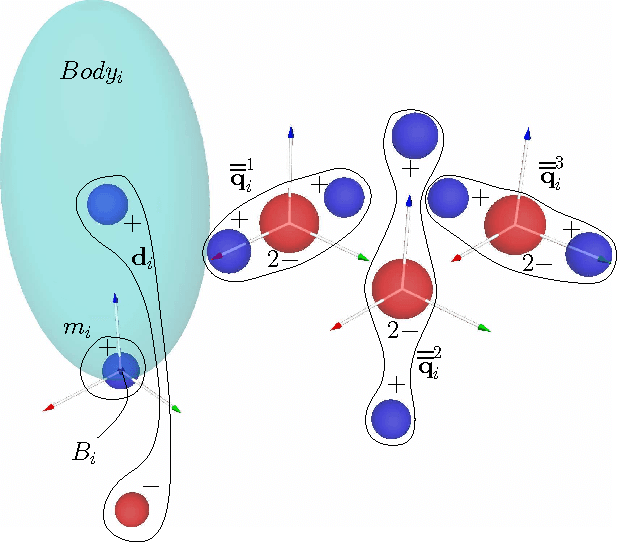
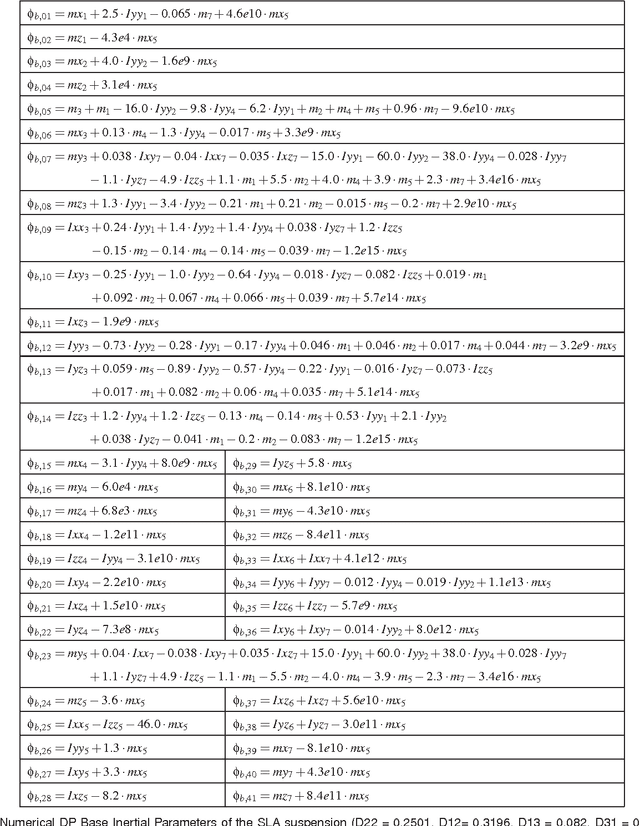
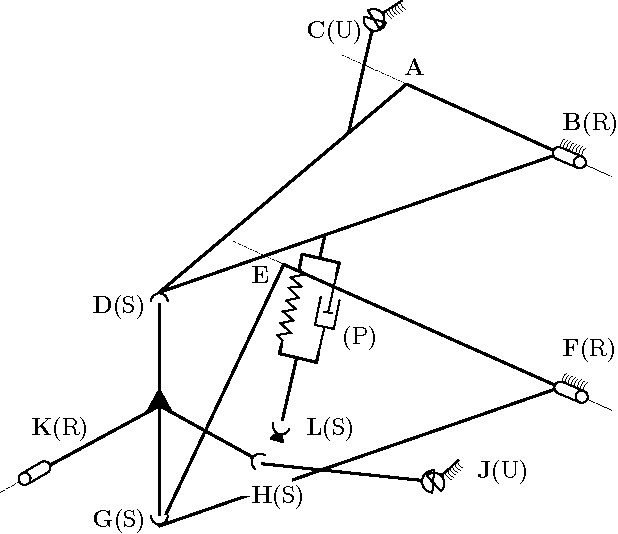
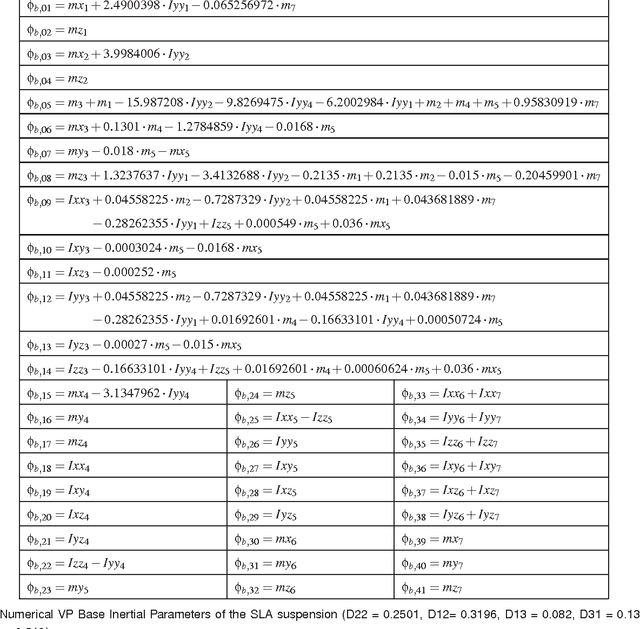
Base inertial parameters constitute a minimal inertial parametrization of mechanical systems that is of interest, for example, in parameter estimation and model reduction. Numerical and symbolic methods are available to determine their expressions. In this paper the problems associated with the numerical determination of the base inertial parameters expressions in the context of low mobility mechanisms are analyzed and discussed through and example. To circumvent these problems two alternatives are proposed: a variable precision arithmetic implementation of the customary numerical algorithm and the application of a general symbolic method. Finally, the advantages of both approaches compared to the numerical one are discussed in the context of the proposed low mobility example.
Symbolic Multibody Methods for Real-Time Simulation of Railway Vehicles
Jun 06, 2017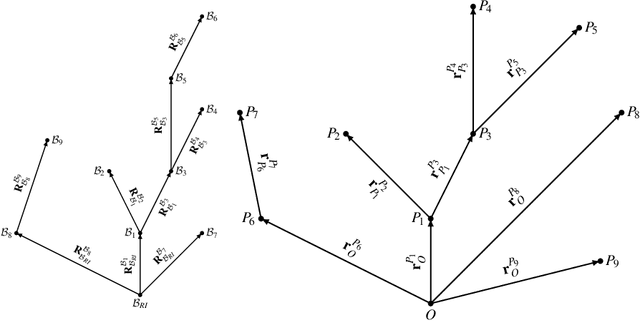
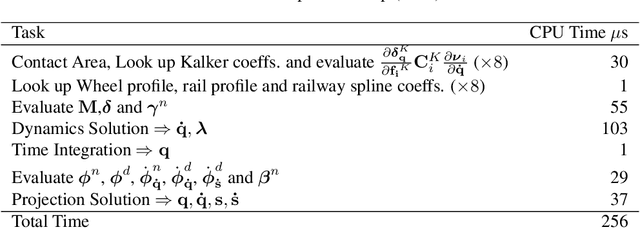
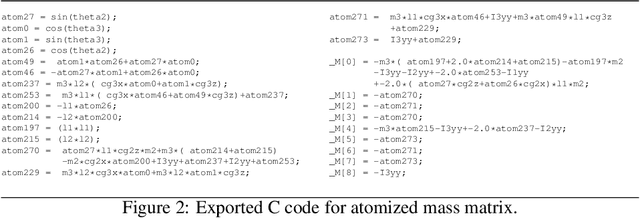
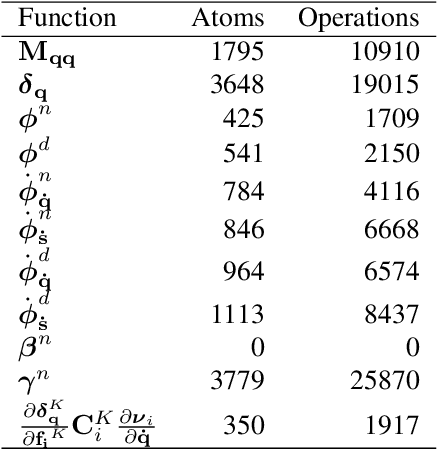
In this work, recently developed state-of-the-art symbolic multibody methods are tested to accurately model a complex railway vehicle. The model is generated using a symbolic implementation of the principle of the virtual power. Creep forces are modeled using a direct symbolic implementation of the standard linear Kalker model. No simplifications, as base parameter reduction, partial-linearization or look-up tables for contact kinematics, are used. An Implicit-Explicit integration scheme is proposed to efficiently deal with the stiff creep dynamics. Hard real-time performance is achieved: the CPU time required for a very stable 1 ms integration time step is 256 {\mu}s.
Simplification of multibody models by parameter reduction
May 29, 2017
Model selection methods are used in different scientific contexts to represent a characteristic data set in terms of a reduced number of parameters. Apparently, these methods have not found their way into the literature on multibody systems dynamics. Multibody models can be considered parametric models in terms of their dynamic parameters, and model selection techniques can then be used to express these models in terms of a reduced number of parameters. These parameter-reduced models are expected to have a smaller computational complexity than the original one and still preserve the desired level of accuracy. They are also known to be good candidates for parameter estimation purposes. In this work, simulations of the actual model are used to define a data set that is representative of the system's standard working conditions. A parameter-reduced model is chosen and its parameter values estimated so that they minimize the prediction error on these data. To that end, model selection heuristics and normalized error measures are proposed. Using this methodology, two multibody systems with very different characteristic mobility are analyzed. Highly considerable reductions in the number of parameters and computational cost are obtained without compromising the accuracy of the reduced model too much. As an additional result, a generalization of the base parameter concept to the context of parameter-reduced models is proposed.