 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing the SEKF to Transfer NN Models of Dynamical Systems with Limited Data
Mar 02, 2026Data-driven models of dynamical systems require extensive amounts of training data. For many practical applications, gathering sufficient data is not feasible due to cost or safety concerns. This work uses the Subset Extended Kalman Filter (SEKF) to adapt pre-trained neural network models to new, similar systems with limited data available. Experimental validation across damped spring and continuous stirred-tank reactor systems demonstrates that small parameter perturbations to the initial model capture target system dynamics while requiring as little as 1% of original training data. In addition, finetuning requires less computational cost and reduces generalization error.
SAFE-OCC: A Novelty Detection Framework for Convolutional Neural Network Sensors and its Application in Process Control
Feb 03, 2022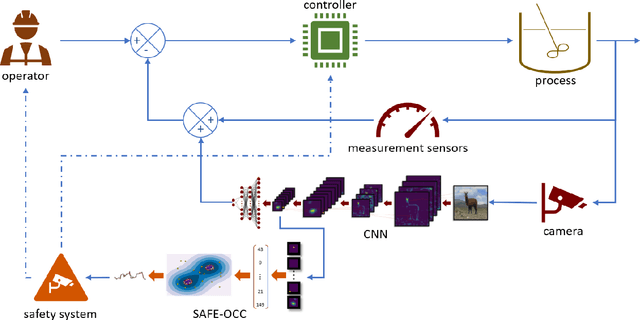
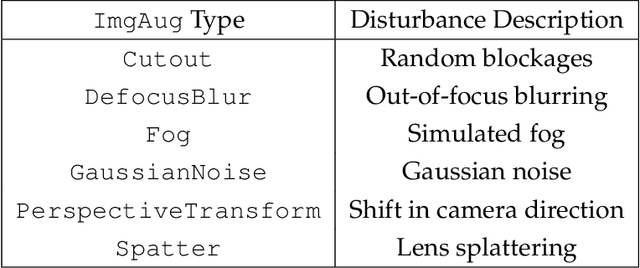
We present a novelty detection framework for Convolutional Neural Network (CNN) sensors that we call Sensor-Activated Feature Extraction One-Class Classification (SAFE-OCC). We show that this framework enables the safe use of computer vision sensors in process control architectures. Emergent control applications use CNN models to map visual data to a state signal that can be interpreted by the controller. Incorporating such sensors introduces a significant system operation vulnerability because CNN sensors can exhibit high prediction errors when exposed to novel (abnormal) visual data. Unfortunately, identifying such novelties in real-time is nontrivial. To address this issue, the SAFE-OCC framework leverages the convolutional blocks of the CNN to create an effective feature space to conduct novelty detection using a desired one-class classification technique. This approach engenders a feature space that directly corresponds to that used by the CNN sensor and avoids the need to derive an independent latent space. We demonstrate the effectiveness of SAFE-OCC via simulated control environments.