 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIshigaki-IDS: An Open-Weight Verifier-Aware Model for Information Delivery Specification Drafting in Building Information Modeling
Jun 07, 2026Building Information Modeling (BIM) projects require information requirements to be described as machine-checkable Information Delivery Specification (IDS) files in order to verify whether building models contain the required attributes. However, IDS authoring remains a practical bottleneck: practitioners must handle domain vocabulary, strict XML schema constraints, and external validator conformance while also checking whether the requirement itself is correctly expressed. We present Ishigaki-IDS, an open-weight LLM specialized for verifier-aware IDS draft generation. The model combines continued pretraining on BIM/IDS corpora, supervised fine-tuning on information-requirement-to-IDS pairs, and reinforcement learning with verifiable rewards from an external validator. The goal is not to replace expert review, but to move IDS authoring from low-level XML and schema repair toward validator-loadable drafts that practitioners can inspect and correct. On the 166-case expert-created Ishigaki-IDS-Bench, Ishigaki-IDS-8B achieves an IDSAuditPass score of 0.651, a validator-pass metric for generated IDS files, substantially outperforming Claude Opus 4.5, the strongest single-shot LLM baseline we evaluated, at 0.331. It also obtains an Audit-Gated FacetF1 of 0.282, which measures requirement-facet alignment among validator-passing drafts. The same recipe scales: 14B and 32B variants reach IDSAuditPass 0.753 / 0.693 and Audit-Gated FacetF1 0.392 / 0.369. In a workflow check with six BIM practitioners, Ishigaki-assisted authoring reduced aggregate work time by 54.7% under the same validation and alignment endpoint. These results suggest that verifier-aware IDS generation can reduce the practical burden of converting BIM information requirements into reviewable IDS drafts.
Ishigaki-IDS-Bench: A Benchmark for Generating Information Delivery Specification from BIM Information Requirements
May 21, 2026Large language models (LLMs) are widely used to generate structured outputs such as JSON, SQL, and code, yet public resources remain limited for evaluating generation that must simultaneously satisfy industry-standard XML and domain vocabulary constraints. This paper presents Ishigaki-IDS-Bench, a benchmark for evaluating the ability to generate Information Delivery Specification (IDS) XML from Building Information Modeling (BIM) information requirements. The benchmark contains 166 BIM/IDS expert-authored and verified examples created by expanding 83 practical scenarios into Japanese and English, corresponding gold IDS files, and metadata for input format, language, turn setting, IFC version, and construction domain. Its evaluation combines IDSAuditTool-based Processability, Structure, and Content audits with content-agreement evaluation against gold IDS files. In zero-shot evaluation over 10 LLMs, the best model reaches 65.6% macro F1 for content agreement, while only 27.7% of outputs pass the Content audit. These results show that current LLMs can express part of the information requirements as IDS, but still struggle to stably generate XML that satisfies the IDS standard and IFC vocabulary constraints. Ishigaki-IDS-Bench supports comparative evaluation, failure analysis, and the development of constrained structured generation methods that conform to domain standards. We release the evaluation scripts and benchmark data under the CC BY 4.0 license on GitHub and Hugging Face.
Collision-free Path Planning on Arbitrary Optimization Criteria in the Latent Space through cGANs
Feb 26, 2022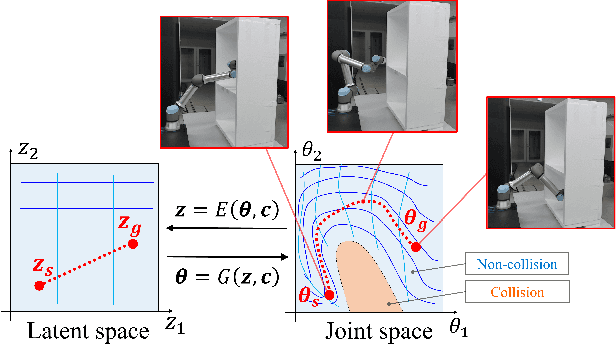
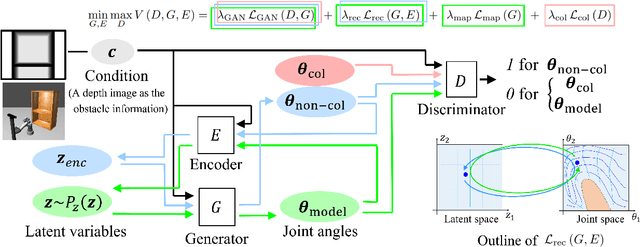
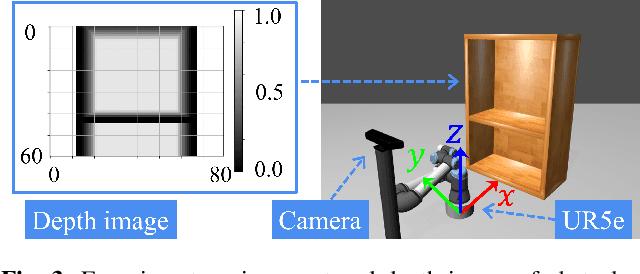
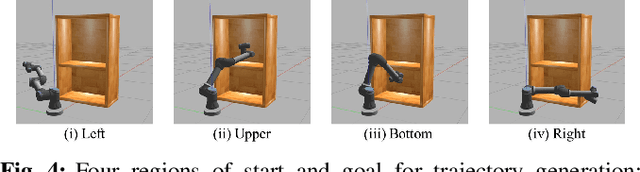
We propose a new method for collision-free path planning by Conditional Generative Adversarial Networks (cGANs) by mapping its latent space to only the collision-free areas of the robot joint space when an obstacle map is given as a condition. When manipulating a robot arm, it is necessary to generate a trajectory that avoids contact with the robot itself or the surrounding environment for safety reasons, and it is convenient to generate multiple arbitrary trajectories appropriate for respective purposes. In the proposed method, various trajectories to avoid obstacles can be generated by connecting the start and goal with arbitrary line segments in this latent space. Our method simply provides this collision-free latent space after which any planner, using any optimization conditions, can be used to generate the most suitable paths on the fly. We successfully verified this method with a simulated and actual UR5e 6-DoF robotic arm. We confirmed that different trajectories can be generated according to different optimization conditions.
Collision-free Path Planning in the Latent Space through cGANs
Feb 15, 2022



We show a new method for collision-free path planning by cGANs by mapping its latent space to only the collision-free areas of the robot joint space. Our method simply provides this collision-free latent space after which any planner, using any optimization conditions, can be used to generate the most suitable paths on the fly. We successfully verified this method with a simulated two-link robot arm.