 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Mechanism Transfer Network for Time Series Domain Adaptation in Mechanical Systems
Oct 13, 2019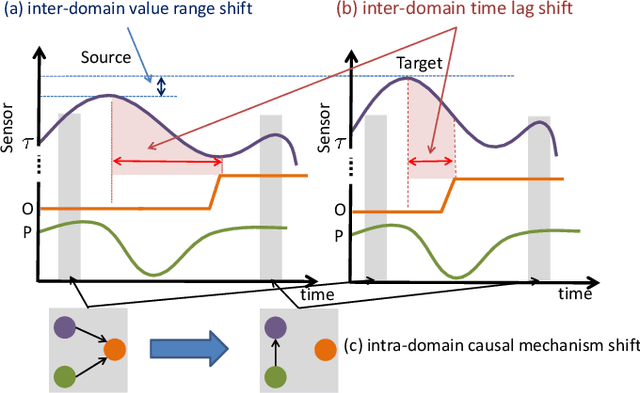
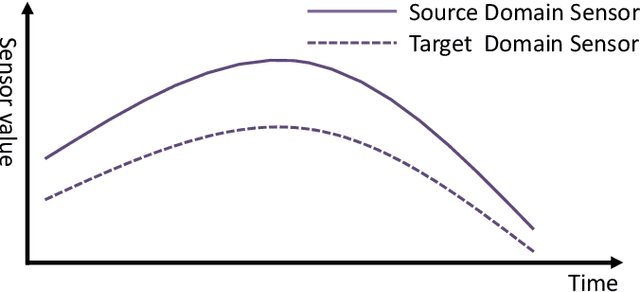
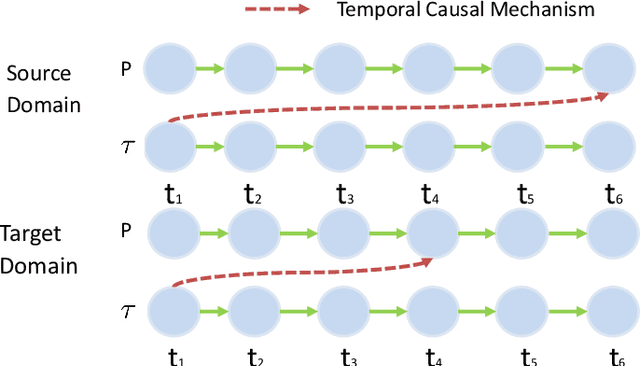
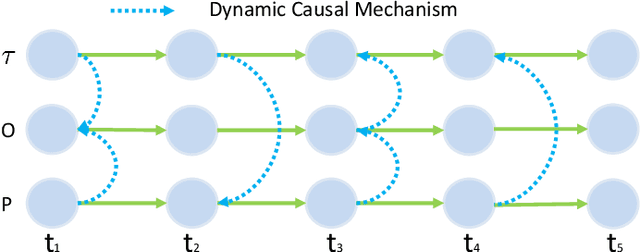
Data-driven models are becoming essential parts in modern mechanical systems, commonly used to capture the behavior of various equipment and varying environmental characteristics. Despite the advantages of these data-driven models on excellent adaptivity to high dynamics and aging equipment, they are usually hungry to massive labels over historical data, mostly contributed by human engineers at an extremely high cost. The label demand is now the major limiting factor to modeling accuracy, hindering the fulfillment of visions for applications. Fortunately, domain adaptation enhances the model generalization by utilizing the labelled source data as well as the unlabelled target data and then we can reuse the model on different domains. However, the mainstream domain adaptation methods cannot achieve ideal performance on time series data, because most of them focus on static samples and even the existing time series domain adaptation methods ignore the properties of time series data, such as temporal causal mechanism. In this paper, we assume that causal mechanism is invariant and present our Causal Mechanism Transfer Network(CMTN) for time series domain adaptation. By capturing and transferring the dynamic and temporal causal mechanism of multivariate time series data and alleviating the time lags and different value ranges among different machines, CMTN allows the data-driven models to exploit existing data and labels from similar systems, such that the resulting model on a new system is highly reliable even with very limited data. We report our empirical results and lessons learned from two real-world case studies, on chiller plant energy optimization and boiler fault detection, which outperforms the existing state-of-the-art method.
Component-Based Distributed Framework for Coherent and Real-Time Video Dehazing
Sep 09, 2016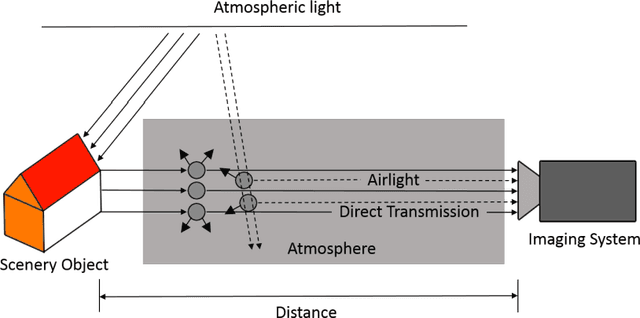
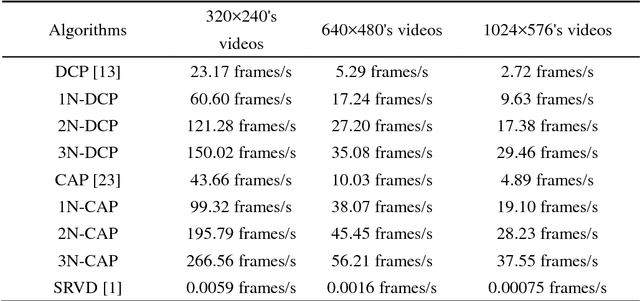
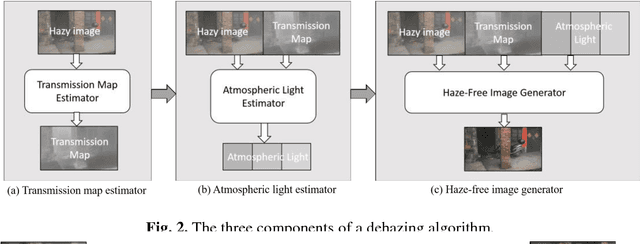
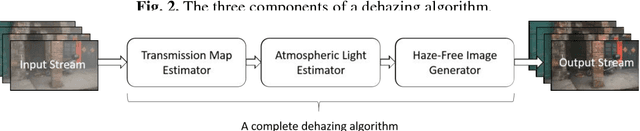
Traditional dehazing techniques, as a well studied topic in image processing, are now widely used to eliminate the haze effects from individual images. However, even the state-of-the-art dehazing algorithms may not provide sufficient support to video analytics, as a crucial pre-processing step for video-based decision making systems (e.g., robot navigation), due to the limitations of these algorithms on poor result coherence and low processing efficiency. This paper presents a new framework, particularly designed for video dehazing, to output coherent results in real time, with two novel techniques. Firstly, we decompose the dehazing algorithms into three generic components, namely transmission map estimator, atmospheric light estimator and haze-free image generator. They can be simultaneously processed by multiple threads in the distributed system, such that the processing efficiency is optimized by automatic CPU resource allocation based on the workloads. Secondly, a cross-frame normalization scheme is proposed to enhance the coherence among consecutive frames, by sharing the parameters of atmospheric light from consecutive frames in the distributed computation platform. The combination of these techniques enables our framework to generate highly consistent and accurate dehazing results in real-time, by using only 3 PCs connected by Ethernet.