 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonstochastic Multiarmed Bandits with Unrestricted Delays
Jun 03, 2019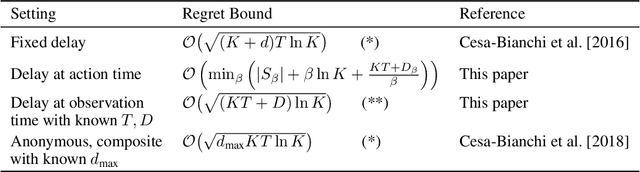
We investigate multiarmed bandits with delayed feedback, where the delays need neither be identical nor bounded. We first prove that the "delayed" Exp3 achieves the $O(\sqrt{(KT + D)\ln K})$ regret bound conjectured by Cesa-Bianchi et al. [2016], in the case of variable, but bounded delays. Here, $K$ is the number of actions and $D$ is the total delay over $T$ rounds. We then introduce a new algorithm that lifts the requirement of bounded delays by using a wrapper that skips rounds with excessively large delays. The new algorithm maintains the same regret bound, but similar to its predecessor requires prior knowledge of $D$ and $T$. For this algorithm we then construct a novel doubling scheme that forgoes this requirement under the assumption that the delays are available at action time (rather than at loss observation time). This assumption is satisfied in a broad range of applications, including interaction with servers and service providers. The resulting oracle regret bound is of order $\min_{\beta} (|S_\beta|+\beta \ln K + (KT + D_\beta)/\beta)$, where $|S_\beta|$ is the number of observations with delay exceeding $\beta$, and $D_\beta$ is the total delay of observations with delay below $\beta$. The bound relaxes to $O(\sqrt{(KT + D)\ln K})$, but we also provide examples where $D_\beta \ll D$ and the oracle bound has a polynomially better dependence on the problem parameters.
Adaptation to Easy Data in Prediction with Limited Advice
Oct 30, 2018We derive an online learning algorithm with improved regret guarantees for `easy' loss sequences. We consider two types of `easiness': (a) stochastic loss sequences and (b) adversarial loss sequences with small effective range of the losses. While a number of algorithms have been proposed for exploiting small effective range in the full information setting, Gerchinovitz and Lattimore [2016] have shown the impossibility of regret scaling with the effective range of the losses in the bandit setting. We show that just one additional observation per round is sufficient to circumvent the impossibility result. The proposed Second Order Difference Adjustments (SODA) algorithm requires no prior knowledge of the effective range of the losses, $\varepsilon$, and achieves an $O(\varepsilon \sqrt{KT \ln K}) + \tilde{O}(\varepsilon K \sqrt[4]{T})$ expected regret guarantee, where $T$ is the time horizon and $K$ is the number of actions. The scaling with the effective loss range is achieved under significantly weaker assumptions than those made by Cesa-Bianchi and Shamir [2018] in an earlier attempt to circumvent the impossibility result. We also provide a regret lower bound of $\Omega(\varepsilon\sqrt{T K})$, which almost matches the upper bound. In addition, we show that in the stochastic setting SODA achieves an $O\left(\sum_{a:\Delta_a>0} \frac{K\varepsilon^2}{\Delta_a}\right)$ pseudo-regret bound that holds simultaneously with the adversarial regret guarantee. In other words, SODA is safe against an unrestricted oblivious adversary and provides improved regret guarantees for at least two different types of `easiness' simultaneously.