 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Navigate by Growing Deep Networks
Dec 14, 2017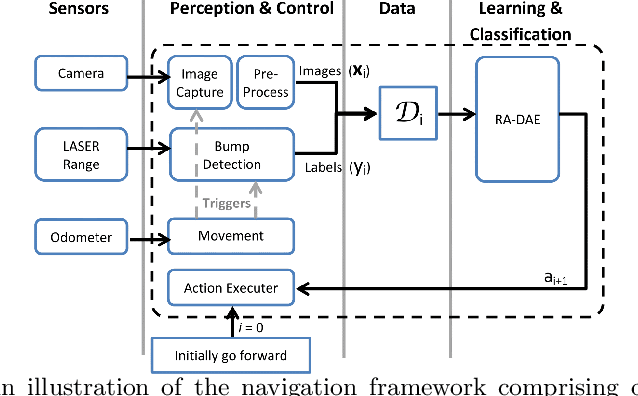
Adaptability is central to autonomy. Intuitively, for high-dimensional learning problems such as navigating based on vision, internal models with higher complexity allow to accurately encode the information available. However, most learning methods rely on models with a fixed structure and complexity. In this paper, we present a self-supervised framework for robots to learn to navigate, without any prior knowledge of the environment, by incrementally building the structure of a deep network as new data becomes available. Our framework captures images from a monocular camera and self labels the images to continuously train and predict actions from a computationally efficient adaptive deep architecture based on Autoencoders (AE), in a self-supervised fashion. The deep architecture, named Reinforced Adaptive Denoising Autoencoders (RA-DAE), uses reinforcement learning to dynamically change the network structure by adding or removing neurons. Experiments were conducted in simulation and real-world indoor and outdoor environments to assess the potential of self-supervised navigation. RA-DAE demonstrates better performance than equivalent non-adaptive deep learning alternatives and can continue to expand its knowledge, trading-off past and present information.
Online Adaptation of Deep Architectures with Reinforcement Learning
Aug 08, 2016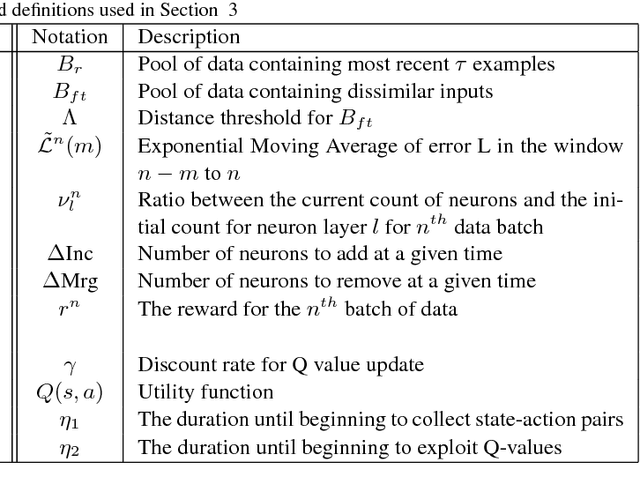
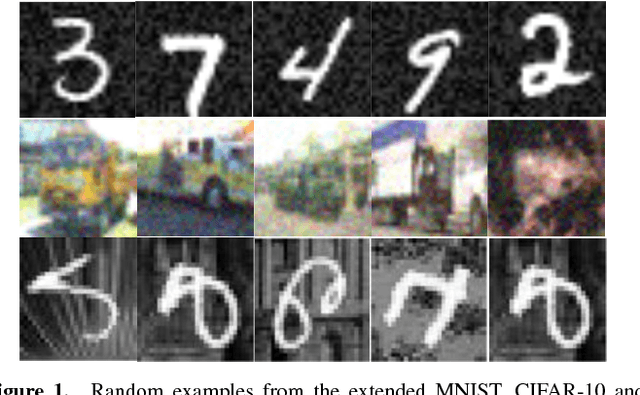
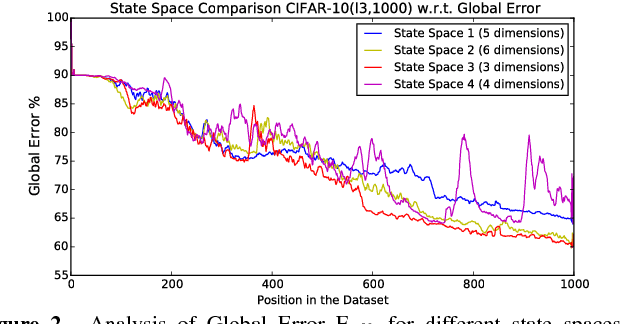
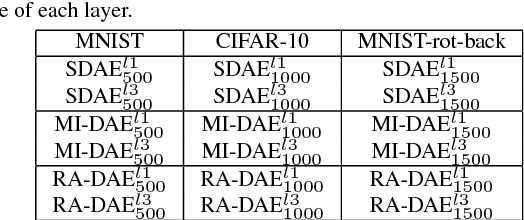
Online learning has become crucial to many problems in machine learning. As more data is collected sequentially, quickly adapting to changes in the data distribution can offer several competitive advantages such as avoiding loss of prior knowledge and more efficient learning. However, adaptation to changes in the data distribution (also known as covariate shift) needs to be performed without compromising past knowledge already built in into the model to cope with voluminous and dynamic data. In this paper, we propose an online stacked Denoising Autoencoder whose structure is adapted through reinforcement learning. Our algorithm forces the network to exploit and explore favourable architectures employing an estimated utility function that maximises the accuracy of an unseen validation sequence. Different actions, such as Pool, Increment and Merge are available to modify the structure of the network. As we observe through a series of experiments, our approach is more responsive, robust, and principled than its counterparts for non-stationary as well as stationary data distributions. Experimental results indicate that our algorithm performs better at preserving gained prior knowledge and responding to changes in the data distribution.