 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-thermal depth correction of RGB-D sensors based on Gaussian Processes in real-time
Jul 01, 2019Commodity RGB-D sensors capture color images along with dense pixel-wise depth information in real-time. Typical RGB-D sensors are provided with a factory calibration and exhibit erratic depth readings due to coarse calibration values, ageing and thermal influence effects. This limits their applicability in computer vision and robotics. We propose a novel method to accurately calibrate depth considering spatial and thermal influences jointly. Our work is based on Gaussian Process Regression in a four dimensional Cartesian and thermal domain. We propose to leverage modern GPUs for dense depth map correction in real-time. For reproducibility we make our dataset and source code publicly available.
Large Area 3D Human Pose Detection Via Stereo Reconstruction in Panoramic Cameras
Jul 01, 2019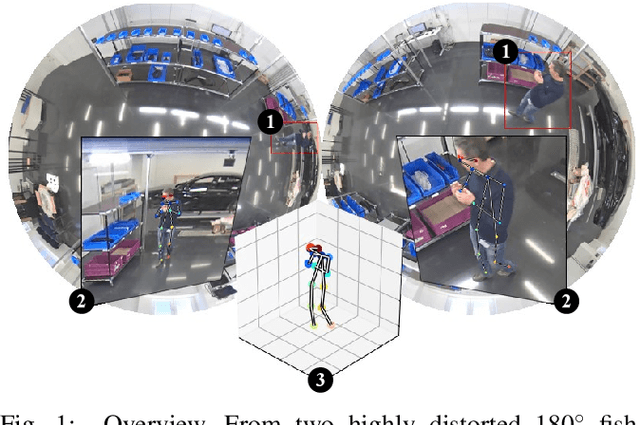
We propose a novel 3D human pose detector using two panoramic cameras. We show that transforming fisheye perspectives to rectilinear views allows a direct application of two-dimensional deep-learning pose estimation methods, without the explicit need for a costly re-training step to compensate for fisheye image distortions. By utilizing panoramic cameras, our method is capable of accurately estimating human poses over a large field of view. This renders our method suitable for ergonomic analyses and other pose based assessments.