 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAM3-Assisted Training of Lightweight YOLO Models for Precision Pig Farming
May 25, 2026Deep learning-based object detection has revolutionized Precision Livestock Farming (PLF), yet a critical barrier remains: high-performance Foundation Models (such as SAM 3) are too computationally intensive for edge deployment, while lightweight models (like YOLO) require prohibitive manual annotation efforts. This work proposes a fully automated knowledge distillation pipeline that leverages the Segment Anything Model 3 (SAM 3) to generate zero-shot pseudo-labels for training efficient YOLOv8 detectors. By treating SAM 3 as an offline auto-annotator, we eliminate the manual labeling bottleneck, producing models capable of real-time inference on resource-constrained hardware. We systematically evaluate this approach on the PigLife dataset, comparing SAM 3-supervised models against human-annotated baselines. Results demonstrate that a SAM 3-trained YOLOv8m achieves a mean Average Precision (mAP) of 79.4% without human intervention, while reducing inference latency by approximately 200$\times$ compared to the teacher model. Furthermore, stratified analysis reveals that in low-occlusion scenarios, the automated pipeline achieves detection rates comparable to human benchmarks ($AP_{50} > 99\%$). These findings indicate that foundation models can serve as effective, zero-annotation-cost supervisors, enabling scalable edge computing solutions for smart agriculture.
Self-Driving Cars: A Survey
Jan 14, 2019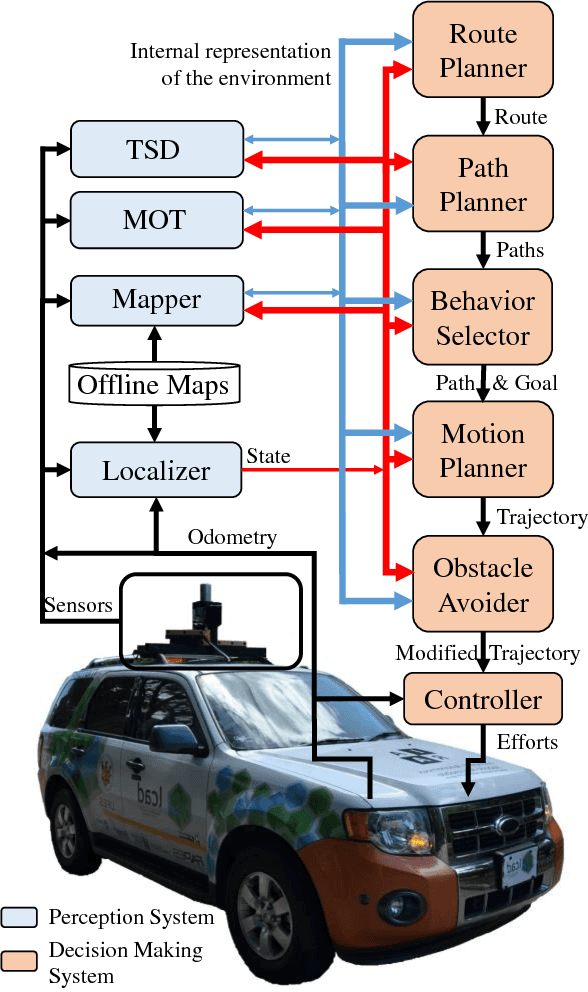
We survey research on self-driving cars published in the literature focusing on autonomous cars developed since the DARPA challenges, which are equipped with an autonomy system that can be categorized as SAE level 3 or higher. The architecture of the autonomy system of self-driving cars is typically organized into the perception system and the decision-making system. The perception system is generally divided into many subsystems responsible for tasks such as self-driving-car localization, static obstacles mapping, moving obstacles detection and tracking, road mapping, traffic signalization detection and recognition, among others. The decision-making system is commonly partitioned as well into many subsystems responsible for tasks such as route planning, path planning, behavior selection, motion planning, and control. In this survey, we present the typical architecture of the autonomy system of self-driving cars. We also review research on relevant methods for perception and decision making. Furthermore, we present a detailed description of the architecture of the autonomy system of the UFES's car, IARA. Finally, we list prominent autonomous research cars developed by technology companies and reported in the media.