 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOVITA: Open-Vocabulary Interpretable Trajectory Adaptations
Aug 24, 2025Adapting trajectories to dynamic situations and user preferences is crucial for robot operation in unstructured environments with non-expert users. Natural language enables users to express these adjustments in an interactive manner. We introduce OVITA, an interpretable, open-vocabulary, language-driven framework designed for adapting robot trajectories in dynamic and novel situations based on human instructions. OVITA leverages multiple pre-trained Large Language Models (LLMs) to integrate user commands into trajectories generated by motion planners or those learned through demonstrations. OVITA employs code as an adaptation policy generated by an LLM, enabling users to adjust individual waypoints, thus providing flexible control. Another LLM, which acts as a code explainer, removes the need for expert users, enabling intuitive interactions. The efficacy and significance of the proposed OVITA framework is demonstrated through extensive simulations and real-world environments with diverse tasks involving spatiotemporal variations on heterogeneous robotic platforms such as a KUKA IIWA robot manipulator, Clearpath Jackal ground robot, and CrazyFlie drone.
Trajectory Adaptation using Large Language Models
Apr 17, 2025



Adapting robot trajectories based on human instructions as per new situations is essential for achieving more intuitive and scalable human-robot interactions. This work proposes a flexible language-based framework to adapt generic robotic trajectories produced by off-the-shelf motion planners like RRT, A-star, etc, or learned from human demonstrations. We utilize pre-trained LLMs to adapt trajectory waypoints by generating code as a policy for dense robot manipulation, enabling more complex and flexible instructions than current methods. This approach allows us to incorporate a broader range of commands, including numerical inputs. Compared to state-of-the-art feature-based sequence-to-sequence models which require training, our method does not require task-specific training and offers greater interpretability and more effective feedback mechanisms. We validate our approach through simulation experiments on the robotic manipulator, aerial vehicle, and ground robot in the Pybullet and Gazebo simulation environments, demonstrating that LLMs can successfully adapt trajectories to complex human instructions.
Separated Attention: An Improved Cycle GAN Based Under Water Image Enhancement Method
Apr 11, 2024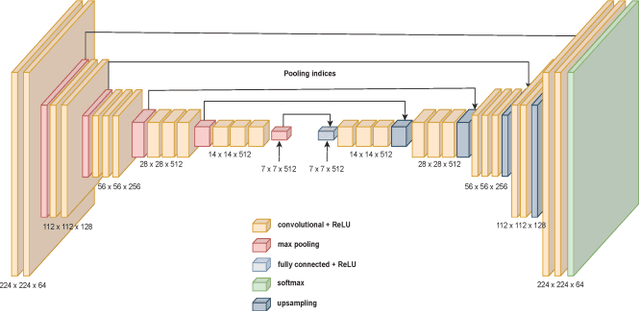
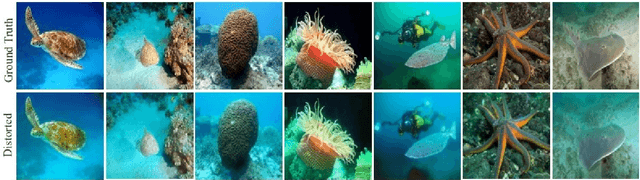
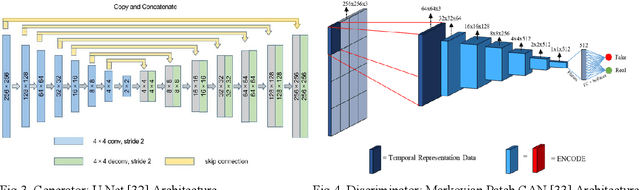
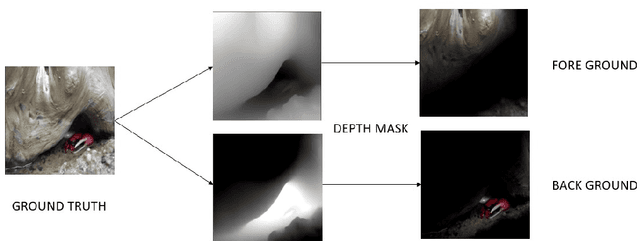
In this paper we have present an improved Cycle GAN based model for under water image enhancement. We have utilized the cycle consistent learning technique of the state-of-the-art Cycle GAN model with modification in the loss function in terms of depth-oriented attention which enhance the contrast of the overall image, keeping global content, color, local texture, and style information intact. We trained the Cycle GAN model with the modified loss functions on the benchmarked Enhancing Underwater Visual Perception (EUPV) dataset a large dataset including paired and unpaired sets of underwater images (poor and good quality) taken with seven distinct cameras in a range of visibility situation during research on ocean exploration and human-robot cooperation. In addition, we perform qualitative and quantitative evaluation which supports the given technique applied and provided a better contrast enhancement model of underwater imagery. More significantly, the upgraded images provide better results from conventional models and further for under water navigation, pose estimation, saliency prediction, object detection and tracking. The results validate the appropriateness of the model for autonomous underwater vehicles (AUV) in visual navigation.