 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Dexterous Manipulation via Anisotropic Friction Modulation using Passive Rollers
Mar 29, 2026Controlling friction at the fingertip is fundamental to dexterous manipulation, yet remains difficult to realize in robotic hands. We present the design and analysis of a robotic fingertip equipped with passive rollers that can be selectively braked or pivoted to modulate contact friction and constraint directions. When unbraked, the rollers permit unconstrained sliding of the contact point along the rolling direction; when braked, they resist motion like a conventional fingertip. The rollers are mounted on a pivoting mechanism, allowing reorientation of the constraint frame to accommodate different manipulation tasks. We develop a constraint-based model of the fingertip integrated into a parallel-jaw gripper and analyze its ability to support diverse manipulation strategies. Experiments show that the proposed design enables a wide range of dexterous actions that are conventionally challenging for robotic grippers, including sliding and pivoting within the grasp, robust adaptation to uncertain contacts, multi-object or multi-part manipulation, and interactions requiring asymmetric friction across fingers. These results demonstrate the versatility of passive roller fingertips as a low-complexity, mechanically efficient approach to friction modulation, advancing the development of more adaptable and robust robotic manipulation.
Towards Embedding Dynamic Personas in Interactive Robots: Masquerading Animated Social Kinematics (MASK)
Mar 15, 2024



This paper presents the design and development of an innovative interactive robotic system to enhance audience engagement using character-like personas. Built upon the foundations of persona-driven dialog agents, this work extends the agent application to the physical realm, employing robots to provide a more immersive and interactive experience. The proposed system, named the Masquerading Animated Social Kinematics (MASK), leverages an anthropomorphic robot which interacts with guests using non-verbal interactions, including facial expressions and gestures. A behavior generation system based upon a finite-state machine structure effectively conditions robotic behavior to convey distinct personas. The MASK framework integrates a perception engine, a behavior selection engine, and a comprehensive action library to enable real-time, dynamic interactions with minimal human intervention in behavior design. Throughout the user subject studies, we examined whether the users could recognize the intended character in film-character-based persona conditions. We conclude by discussing the role of personas in interactive agents and the factors to consider for creating an engaging user experience.
Learning Dynamic Manipulation Skills from Haptic-Play
Jul 28, 2022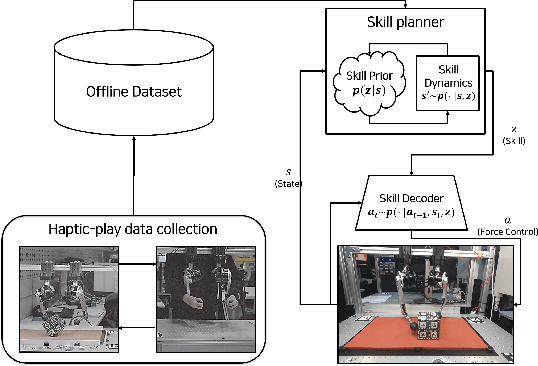
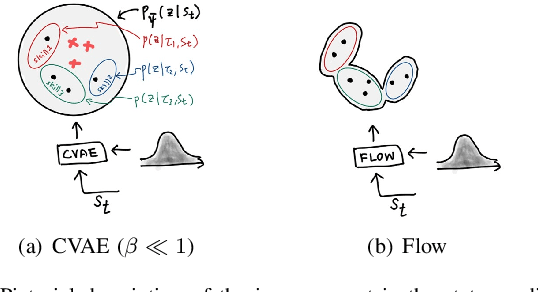
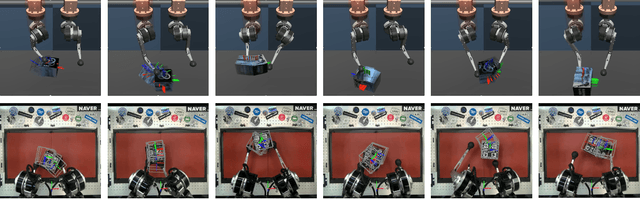
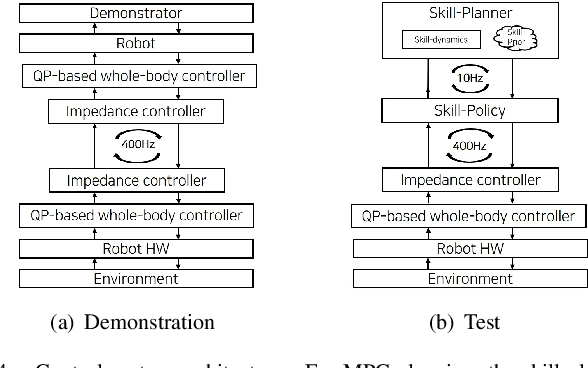
In this paper, we propose a data-driven skill learning approach to solve highly dynamic manipulation tasks entirely from offline teleoperated play data. We use a bilateral teleoperation system to continuously collect a large set of dexterous and agile manipulation behaviors, which is enabled by providing direct force feedback to the operator. We jointly learn the state conditional latent skill distribution and skill decoder network in the form of goal-conditioned policy and skill conditional state transition dynamics using a two-stage generative modeling framework. This allows one to perform robust model-based planning, both online and offline planning methods, in the learned skill-space to accomplish any given downstream tasks at test time. We provide both simulated and real-world dual-arm box manipulation experiments showing that a sequence of force-controlled dynamic manipulation skills can be composed in real-time to successfully configure the box to the randomly selected target position and orientation; please refer to the supplementary video, https://youtu.be/LA5B236ILzM.