 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStag hunt game-based approach for cooperative UAVs
Aug 29, 2022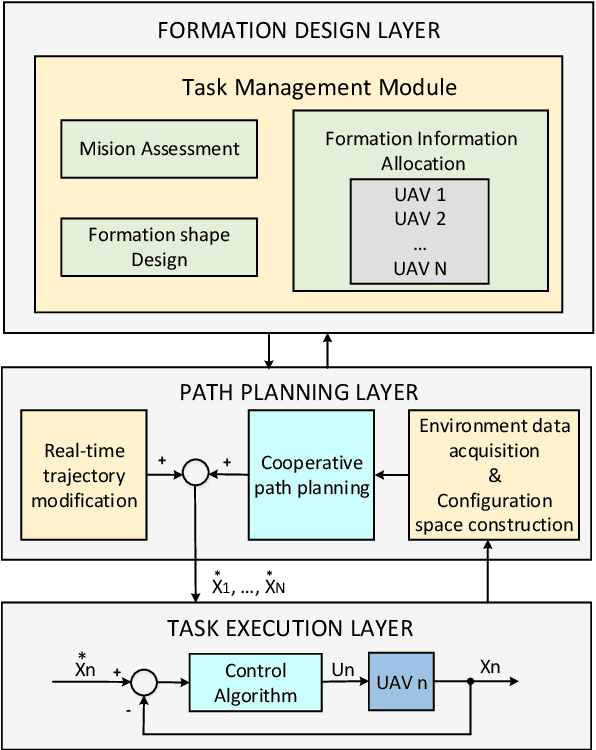
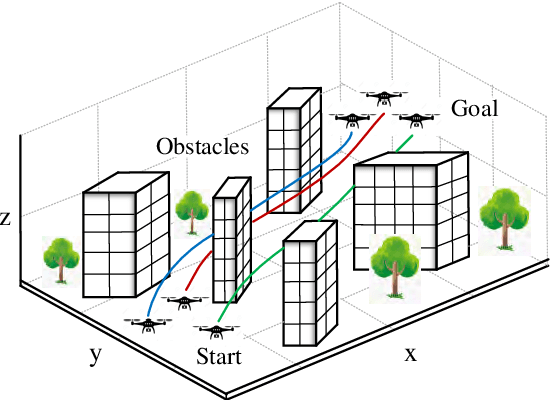
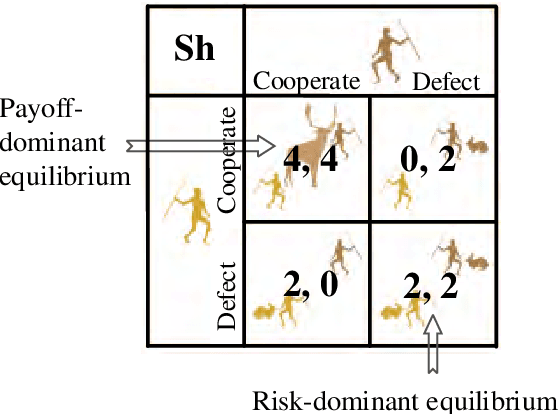
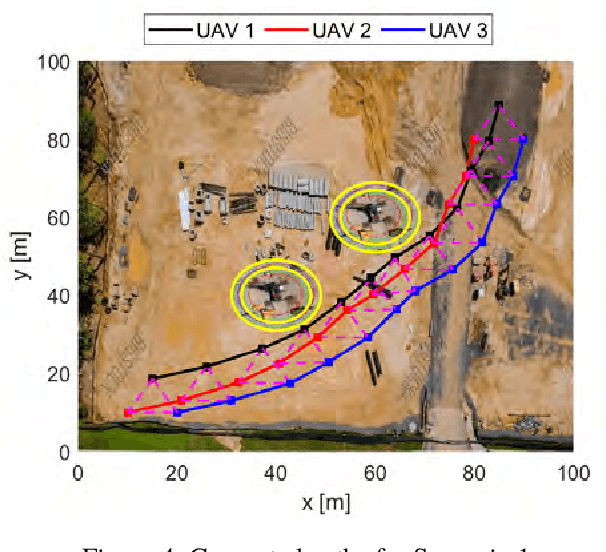
Unmanned aerial vehicles (UAVs) are being employed in many areas such as photography, emergency, entertainment, defence, agriculture, forestry, mining and construction. Over the last decade, UAV technology has found applications in numerous construction project phases, ranging from site mapping, progress monitoring, building inspection, damage assessments, and material delivery. While extensive studies have been conducted on the advantages of UAVs for various construction-related processes, studies on UAV collaboration to improve the task capacity and efficiency are still scarce. This paper proposes a new cooperative path planning algorithm for multiple UAVs based on the stag hunt game and particle swarm optimization (PSO). First, a cost function for each UAV is defined, incorporating multiple objectives and constraints. The UAV game framework is then developed to formulate the multi-UAV path planning into the problem of finding payoff-dominant equilibrium. Next, a PSO-based algorithm is proposed to obtain optimal paths for the UAVs. Simulation results for a large construction site inspected by three UAVs indicate the effectiveness of the proposed algorithm in generating feasible and efficient flight paths for UAV formation during the inspection task.
A Spatial-temporal 3D Human Pose Reconstruction Framework
Jan 10, 2019
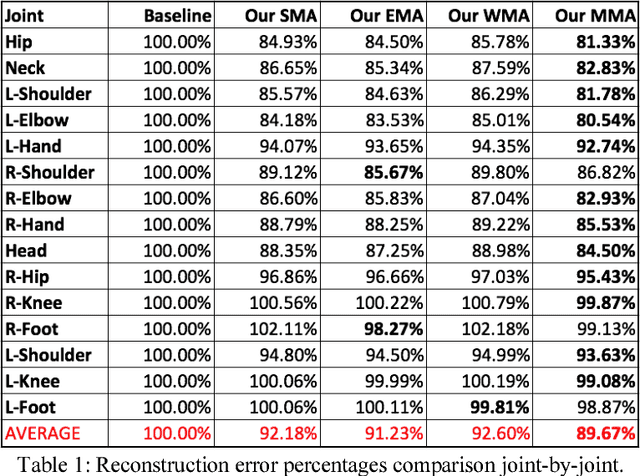
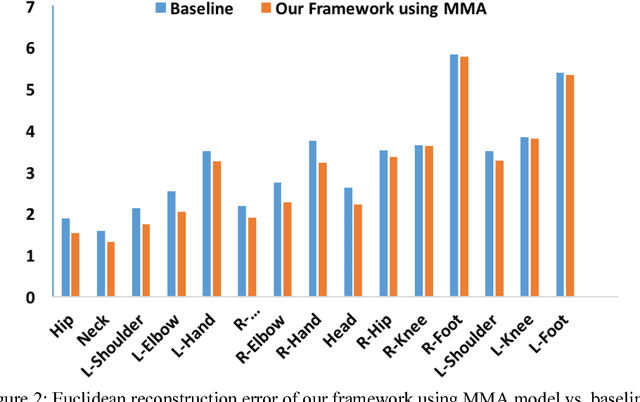
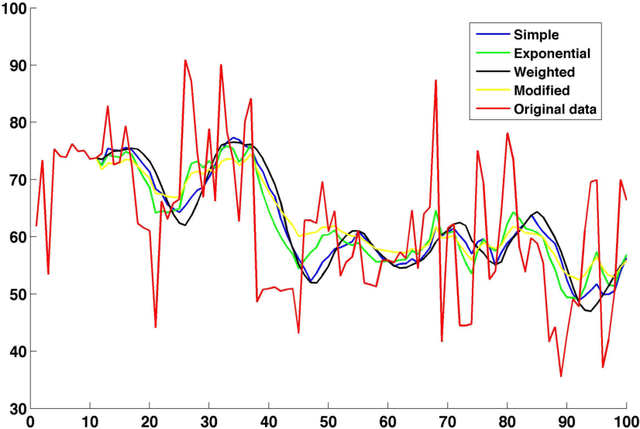
3D human pose reconstruction from single-view camera is a difficult and challenging topic. Many approaches have been proposed, but almost focusing on frame-by-frame independently while inter-frames are highly correlated in a pose sequence. In contrast, we introduce a novel spatial-temporal 3D reconstruction framework that leverages both intra and inter frame relationships in consecutive 2D pose sequences. Orthogonal Matching Pursuit (OMP) algorithm, pre-trained Pose-angle Limits and Temporal Models have been implemented. We quantitatively compare our framework versus recent works on CMU motion capture dataset and Vietnamese traditional dance sequences. Our method outperforms others with 10 percent lower of Euclidean reconstruction error and robustness against Gaussian noise. Additionally, it is also important to mention that our reconstructed 3D pose sequences are smoother and more natural than others.