 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservation of high-energy neutrinos from the Galactic plane
Jul 10, 2023The origin of high-energy cosmic rays, atomic nuclei that continuously impact Earth's atmosphere, has been a mystery for over a century. Due to deflection in interstellar magnetic fields, cosmic rays from the Milky Way arrive at Earth from random directions. However, near their sources and during propagation, cosmic rays interact with matter and produce high-energy neutrinos. We search for neutrino emission using machine learning techniques applied to ten years of data from the IceCube Neutrino Observatory. We identify neutrino emission from the Galactic plane at the 4.5$\sigma$ level of significance, by comparing diffuse emission models to a background-only hypothesis. The signal is consistent with modeled diffuse emission from the Galactic plane, but could also arise from a population of unresolved point sources.
* Submitted on May 12th, 2022; Accepted on May 4th, 2023
Stag hunt game-based approach for cooperative UAVs
Aug 29, 2022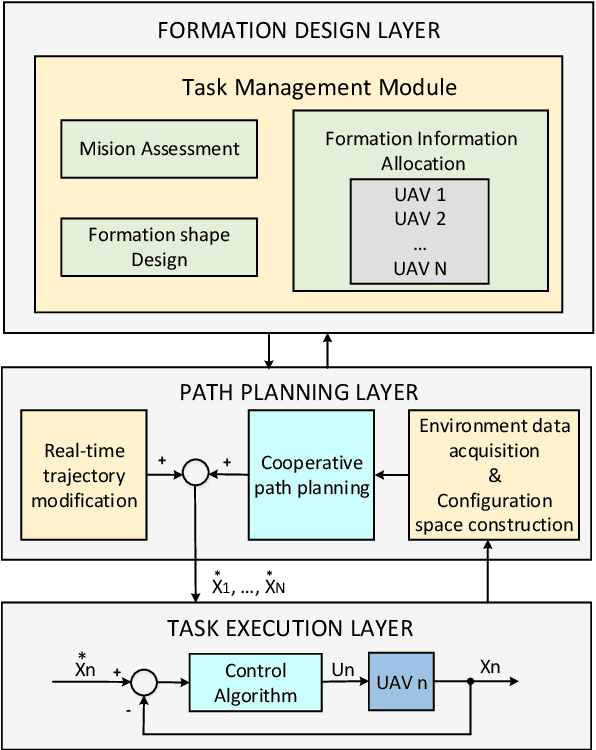
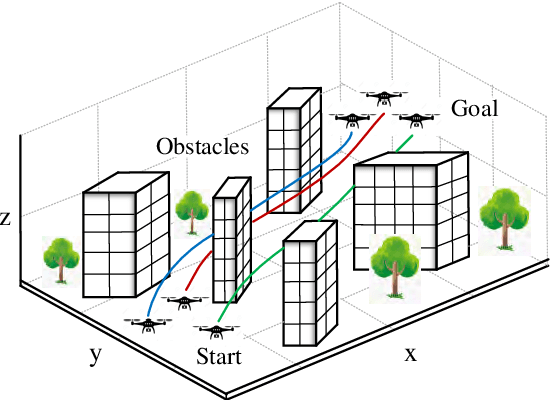
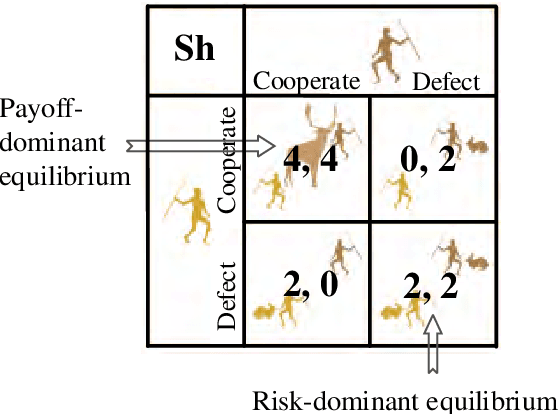
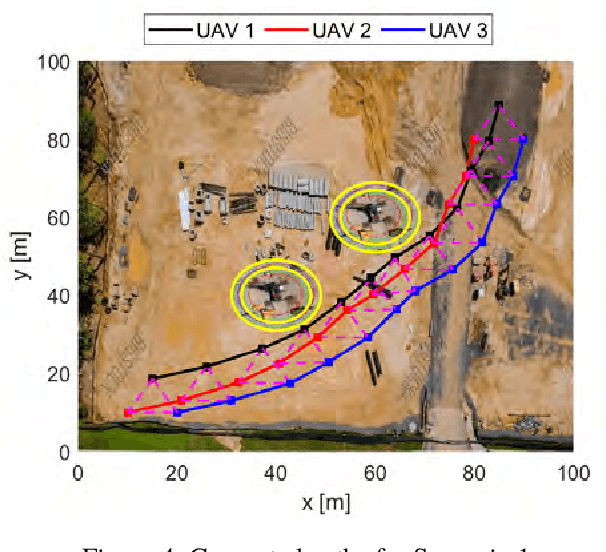
Unmanned aerial vehicles (UAVs) are being employed in many areas such as photography, emergency, entertainment, defence, agriculture, forestry, mining and construction. Over the last decade, UAV technology has found applications in numerous construction project phases, ranging from site mapping, progress monitoring, building inspection, damage assessments, and material delivery. While extensive studies have been conducted on the advantages of UAVs for various construction-related processes, studies on UAV collaboration to improve the task capacity and efficiency are still scarce. This paper proposes a new cooperative path planning algorithm for multiple UAVs based on the stag hunt game and particle swarm optimization (PSO). First, a cost function for each UAV is defined, incorporating multiple objectives and constraints. The UAV game framework is then developed to formulate the multi-UAV path planning into the problem of finding payoff-dominant equilibrium. Next, a PSO-based algorithm is proposed to obtain optimal paths for the UAVs. Simulation results for a large construction site inspected by three UAVs indicate the effectiveness of the proposed algorithm in generating feasible and efficient flight paths for UAV formation during the inspection task.
A Convolutional Neural Network based Cascade Reconstruction for the IceCube Neutrino Observatory
Jan 27, 2021Continued improvements on existing reconstruction methods are vital to the success of high-energy physics experiments, such as the IceCube Neutrino Observatory. In IceCube, further challenges arise as the detector is situated at the geographic South Pole where computational resources are limited. However, to perform real-time analyses and to issue alerts to telescopes around the world, powerful and fast reconstruction methods are desired. Deep neural networks can be extremely powerful, and their usage is computationally inexpensive once the networks are trained. These characteristics make a deep learning-based approach an excellent candidate for the application in IceCube. A reconstruction method based on convolutional architectures and hexagonally shaped kernels is presented. The presented method is robust towards systematic uncertainties in the simulation and has been tested on experimental data. In comparison to standard reconstruction methods in IceCube, it can improve upon the reconstruction accuracy, while reducing the time necessary to run the reconstruction by two to three orders of magnitude.