 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStag hunt game-based approach for cooperative UAVs
Aug 29, 2022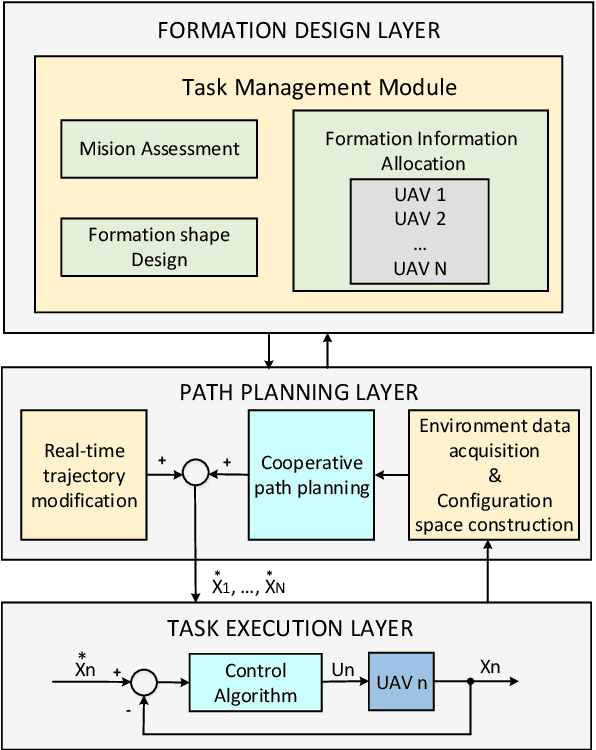
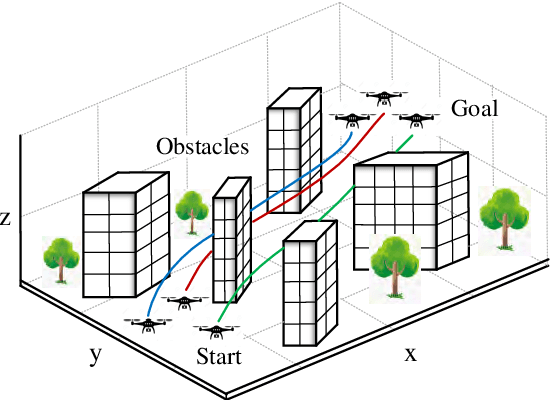
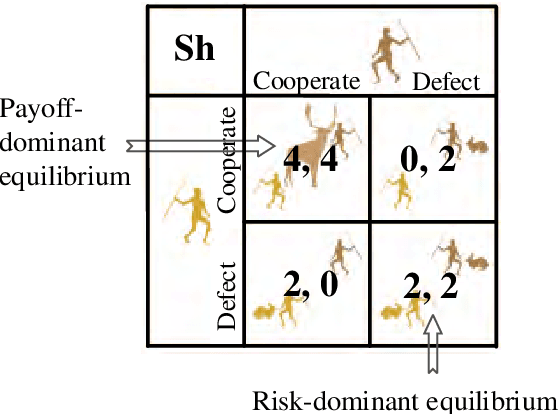
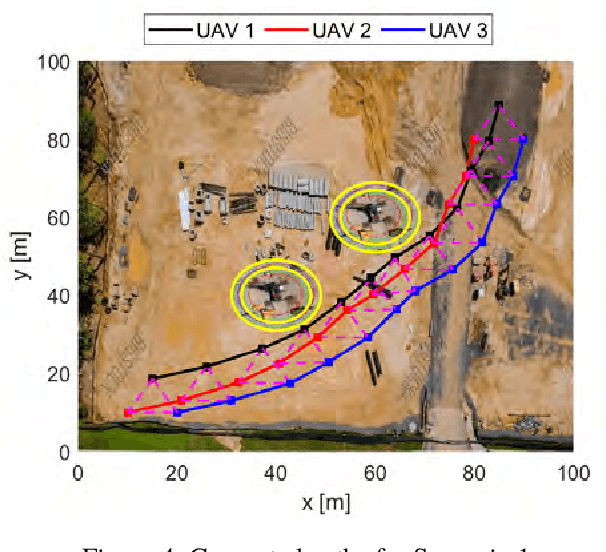
Unmanned aerial vehicles (UAVs) are being employed in many areas such as photography, emergency, entertainment, defence, agriculture, forestry, mining and construction. Over the last decade, UAV technology has found applications in numerous construction project phases, ranging from site mapping, progress monitoring, building inspection, damage assessments, and material delivery. While extensive studies have been conducted on the advantages of UAVs for various construction-related processes, studies on UAV collaboration to improve the task capacity and efficiency are still scarce. This paper proposes a new cooperative path planning algorithm for multiple UAVs based on the stag hunt game and particle swarm optimization (PSO). First, a cost function for each UAV is defined, incorporating multiple objectives and constraints. The UAV game framework is then developed to formulate the multi-UAV path planning into the problem of finding payoff-dominant equilibrium. Next, a PSO-based algorithm is proposed to obtain optimal paths for the UAVs. Simulation results for a large construction site inspected by three UAVs indicate the effectiveness of the proposed algorithm in generating feasible and efficient flight paths for UAV formation during the inspection task.
Reconfigurable Multi-UAV Formation Using Angle-Encoded PSO
Sep 07, 2019



In this paper, we propose an algorithm for the formation of multiple UAVs used in vision-based inspection of infrastructure. A path planning algorithm is first developed by using a variant of the particle swarm optimisation, named theta-PSO, to generate a feasible path for the overall formation configuration taken into account the constraints for visual inspection. Here, we introduced a cost function that includes various constraints on flight safety and visual inspection. A reconfigurable topology is then added based on the use of intermediate waypoints to allow the formation to avoid collision with obstacles during operation. The planned path and formation are then combined to derive the trajectory and velocity profiles for each UAV. Experiments have been conducted for the task of inspecting a light rail bridge. The results confirmed the validity and effectiveness of the proposed algorithm.
* Pages 1670 - 1675
Angle-Encoded Swarm Optimization for UAV Formation Path Planning
Dec 19, 2018



This paper presents a novel and feasible path planning technique for a group of unmanned aerial vehicles (UAVs) conducting surface inspection of infrastructure. The ultimate goal is to minimise the travel distance of UAVs while simultaneously avoid obstacles, and maintain altitude constraints as well as the shape of the UAV formation. A multiple-objective optimisation algorithm, called the Angle-encoded Particle Swarm Optimization (theta-PSO) algorithm, is proposed to accelerate the swarm convergence with angular velocity and position being used for the location of particles. The whole formation is modelled as a virtual rigid body and controlled to maintain a desired geometric shape among the paths created while the centroid of the group follows a pre-determined trajectory. Based on the testbed of 3DR Solo drones equipped with a proprietary Mission Planner, and the Internet-of-Things (IoT) for multi-directional transmission and reception of data between the UAVs, extensive experiments have been conducted for triangular formation maintenance along a monorail bridge. The results obtained confirm the feasibility and effectiveness of the proposed approach.
Crack Detection Using Enhanced Thresholding on UAV based Collected Images
Dec 19, 2018



This paper proposes a thresholding approach for crack detection in an unmanned aerial vehicle (UAV) based infrastructure inspection system. The proposed algorithm performs recursively on the intensity histogram of UAV-taken images to exploit their crack-pixels appearing at the low intensity interval. A quantified criterion of interclass contrast is proposed and employed as an object cost and stop condition for the recursive process. Experiments on different datasets show that our algorithm outperforms different segmentation approaches to accurately extract crack features of some commercial buildings.
Adaptive twisting sliding mode control for quadrotor unmanned aerial vehicles
Jun 05, 2018



This work addresses the problem of robust attitude control of quadcopters. First, the mathematical model of the quadcopter is derived considering factors such as nonlinearity, external disturbances, uncertain dynamics and strong coupling. An adaptive twisting sliding mode control algorithm is then developed with the objective of controlling the quadcopter to track desired attitudes under various conditions. For this, the twisting sliding mode control law is modified with a proposed gain adaptation scheme to improve the control transient and tracking performance. Extensive simulation studies and comparisons with experimental data have been carried out for a Solo quadcopter. The results show that the proposed control scheme can achieve strong robustness against disturbances while is adaptable to parametric variations.
Automatic Interpretation of Unordered Point Cloud Data for UAV Navigation in Construction
Feb 12, 2017



The objective of this work is to develop a data processing system that can automatically generate waypoints for navigation of an unmanned aerial vehicle (UAV) to inspect surfaces of structures like buildings and bridges. The input includes data recorded by two 2D laser scanners, orthogonally mounted on the UAV, and an inertial measurement unit (IMU). To achieve the goal, algorithms are developed to process the data collected. They are separated into three major groups: (i) the data registration and filtering to generate a 3D model of the structure and control the density of point clouds for data completeness enhancement; (ii) the surface and obstacle detection to assist the UAV in monitoring tasks; and (iii) the waypoint generation to set the flight path. Experiments on different data sets show that the developed system is able to reconstruct a 3D point cloud of the structure, extract its surfaces and objects, and generate waypoints for the UAV to accomplish inspection tasks.