 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot
Feb 25, 2026Trials cyclists and mountain bike riders can hop, jump, balance, and drive on one or both wheels. This versatility allows them to achieve speed and energy-efficiency on smooth terrain and agility over rough terrain. Inspired by these athletes, we present the design and control of a robotic platform, Ultra Mobility Vehicle (UMV), which combines a bicycle and a reaction mass to move dynamically with minimal actuated degrees of freedom. We employ a simulation-driven design optimization process to synthesize a spatial linkage topology with a focus on vertical jump height and momentum-based balancing on a single wheel contact. Using a constrained Reinforcement Learning (RL) framework, we demonstrate zero-shot transfer of diverse athletic behaviors, including track-stands, jumps, wheelies, rear wheel hopping, and front flips. This 23.5 kg robot is capable of high speeds (8 m/s) and jumping on and over large obstacles (1 m tall, or 130% of the robot's nominal height).
Proxy Templates for Inverse Compositional Photometric Bundle Adjustment
Apr 23, 2017
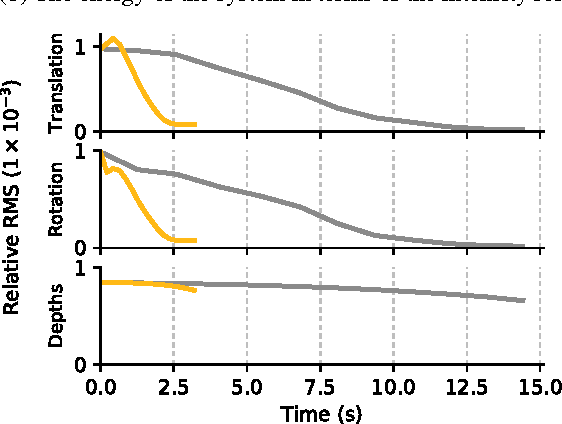
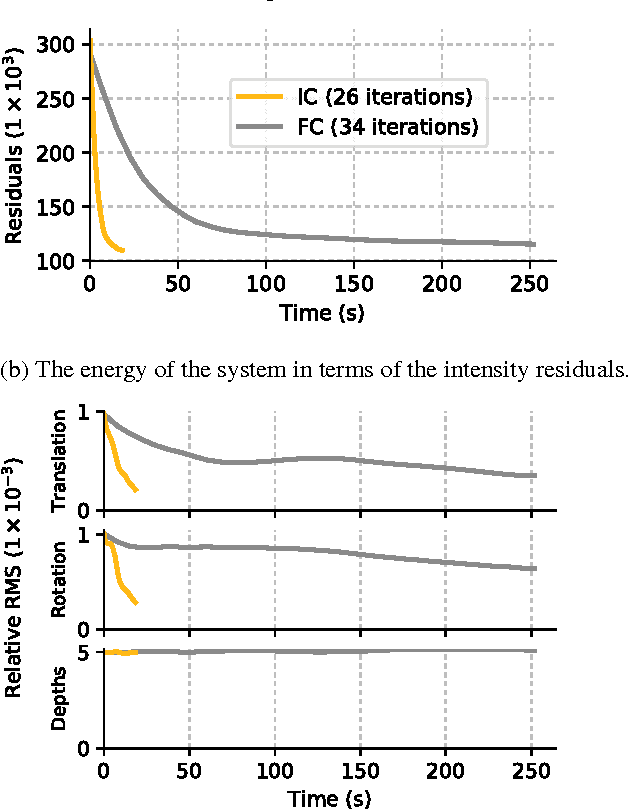

Recent advances in 3D vision have demonstrated the strengths of photometric bundle adjustment. By directly minimizing reprojected pixel errors, instead of geometric reprojection errors, such methods can achieve sub-pixel alignment accuracy in both high and low textured regions. Typically, these problems are solved using a forwards compositional Lucas-Kanade formulation parameterized by 6-DoF rigid camera poses and a depth per point in the structure. For large problems the most CPU-intensive component of the pipeline is the creation and factorization of the Hessian matrix at each iteration. For many warps, the inverse compositional formulation can offer significant speed-ups since the Hessian need only be inverted once. In this paper, we show that an ordinary inverse compositional formulation does not work for warps of this type of parameterization due to ill-conditioning of its partial derivatives. However, we show that it is possible to overcome this limitation by introducing the concept of a proxy template image. We show an order of magnitude improvement in speed, with little effect on quality, going from forwards to inverse compositional in our own photometric bundle adjustment method designed for object-centric structure from motion. This means less processing time for large systems or denser reconstructions under the same real-time constraints. We additionally show that this theory can be readily applied to existing methods by integrating it with the recently released Direct Sparse Odometry SLAM algorithm.