 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesPerf: Minimizing Performance Monitoring Errors Using Bayesian Statistics
Feb 22, 2021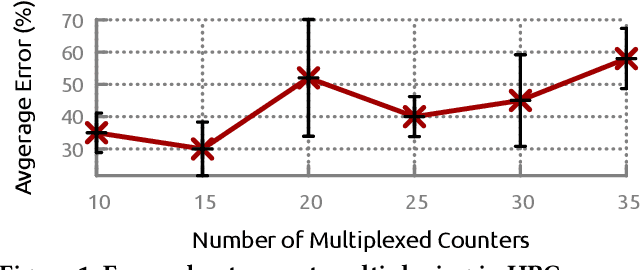
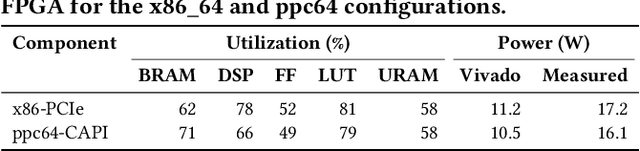
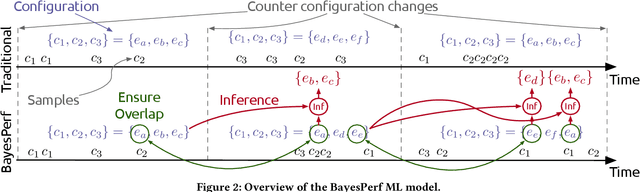
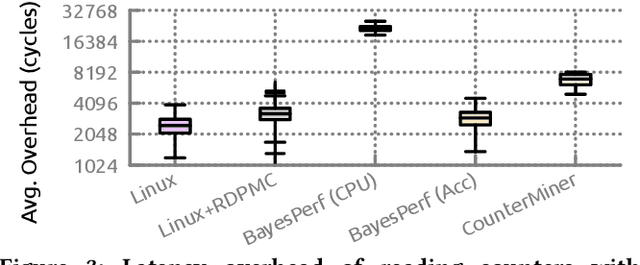
Hardware performance counters (HPCs) that measure low-level architectural and microarchitectural events provide dynamic contextual information about the state of the system. However, HPC measurements are error-prone due to non determinism (e.g., undercounting due to event multiplexing, or OS interrupt-handling behaviors). In this paper, we present BayesPerf, a system for quantifying uncertainty in HPC measurements by using a domain-driven Bayesian model that captures microarchitectural relationships between HPCs to jointly infer their values as probability distributions. We provide the design and implementation of an accelerator that allows for low-latency and low-power inference of the BayesPerf model for x86 and ppc64 CPUs. BayesPerf reduces the average error in HPC measurements from 40.1% to 7.6% when events are being multiplexed. The value of BayesPerf in real-time decision-making is illustrated with a simple example of scheduling of PCIe transfers.
ML-driven Malware that Targets AV Safety
Apr 24, 2020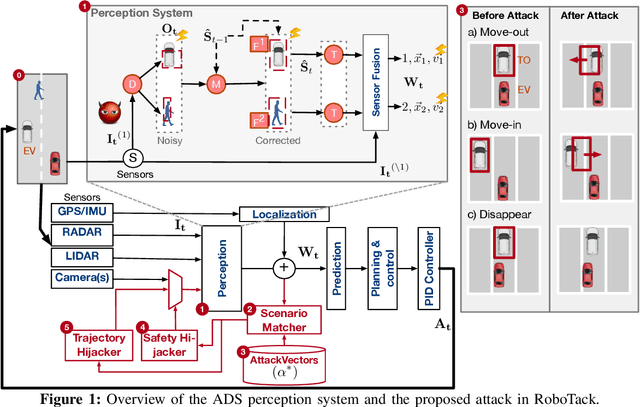
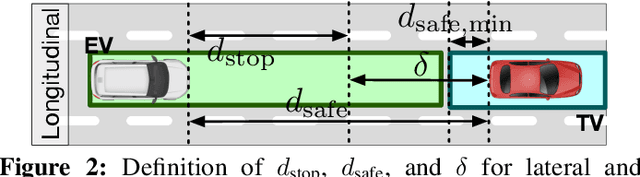
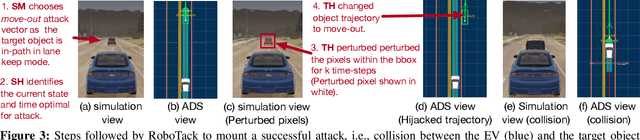

Ensuring the safety of autonomous vehicles (AVs) is critical for their mass deployment and public adoption. However, security attacks that violate safety constraints and cause accidents are a significant deterrent to achieving public trust in AVs, and that hinders a vendor's ability to deploy AVs. Creating a security hazard that results in a severe safety compromise (for example, an accident) is compelling from an attacker's perspective. In this paper, we introduce an attack model, a method to deploy the attack in the form of smart malware, and an experimental evaluation of its impact on production-grade autonomous driving software. We find that determining the time interval during which to launch the attack is{ critically} important for causing safety hazards (such as collisions) with a high degree of success. For example, the smart malware caused 33X more forced emergency braking than random attacks did, and accidents in 52.6% of the driving simulations.
* Accepted for DSN 2020
ML-based Fault Injection for Autonomous Vehicles: A Case for Bayesian Fault Injection
Jul 01, 2019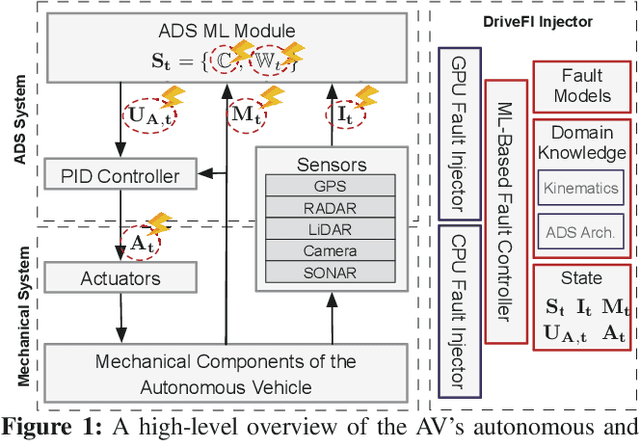
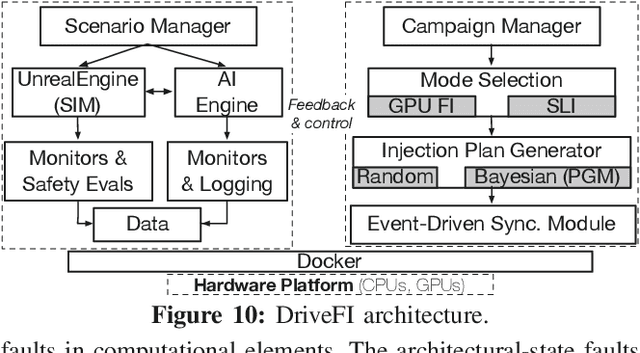
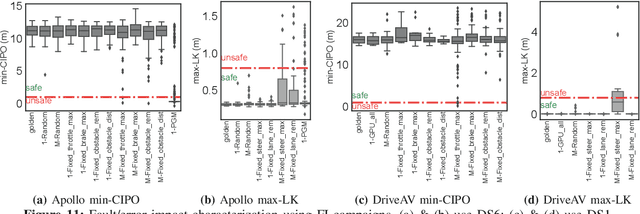
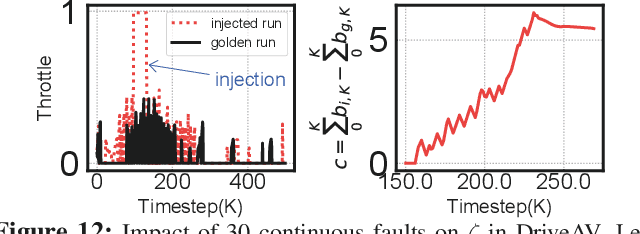
The safety and resilience of fully autonomous vehicles (AVs) are of significant concern, as exemplified by several headline-making accidents. While AV development today involves verification, validation, and testing, end-to-end assessment of AV systems under accidental faults in realistic driving scenarios has been largely unexplored. This paper presents DriveFI, a machine learning-based fault injection engine, which can mine situations and faults that maximally impact AV safety, as demonstrated on two industry-grade AV technology stacks (from NVIDIA and Baidu). For example, DriveFI found 561 safety-critical faults in less than 4 hours. In comparison, random injection experiments executed over several weeks could not find any safety-critical faults