 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling conditional probabilities with Riemann-Theta Boltzmann Machines
May 27, 2019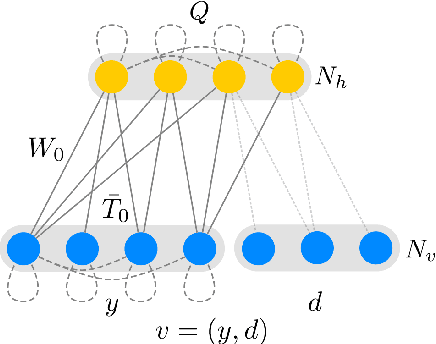

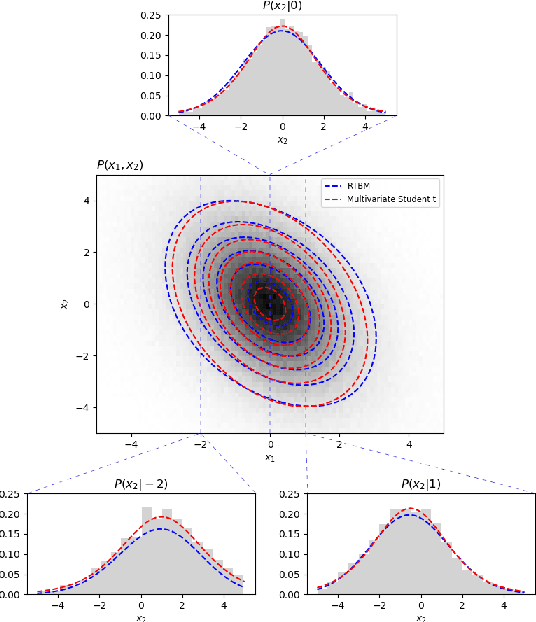
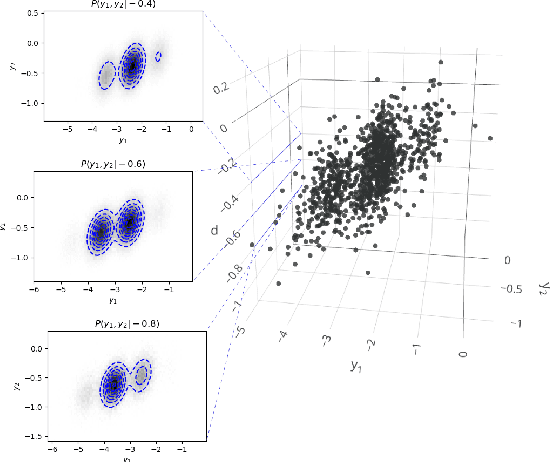
The probability density function for the visible sector of a Riemann-Theta Boltzmann machine can be taken conditional on a subset of the visible units. We derive that the corresponding conditional density function is given by a reparameterization of the Riemann-Theta Boltzmann machine modelling the original probability density function. Therefore the conditional densities can be directly inferred from the Riemann-Theta Boltzmann machine.
Jet grooming through reinforcement learning
Mar 22, 2019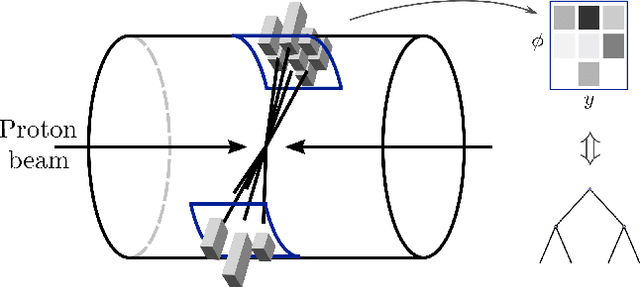
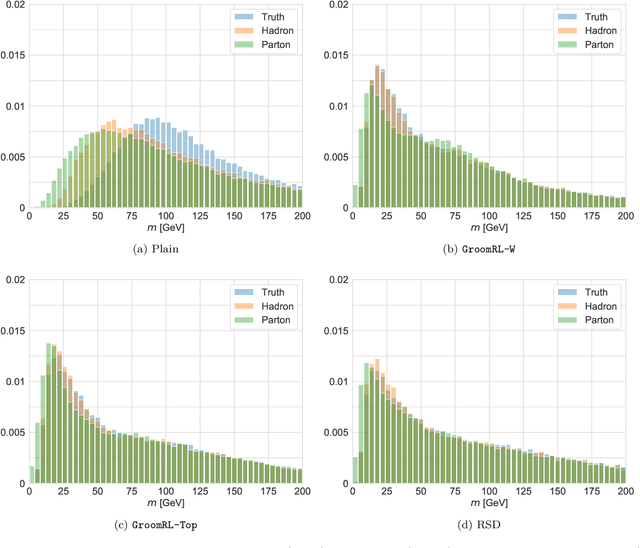
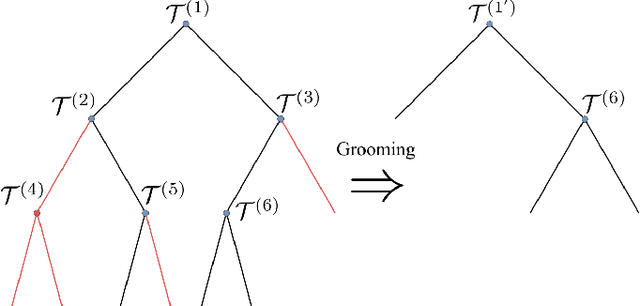
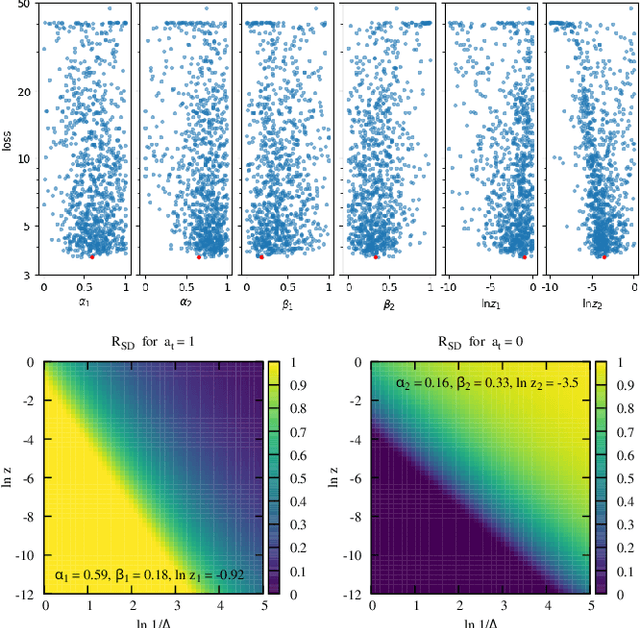
We introduce a novel implementation of a reinforcement learning (RL) algorithm which is designed to find an optimal jet grooming strategy, a critical tool for collider experiments. The RL agent is trained with a reward function constructed to optimize the resulting jet properties, using both signal and background samples in a simultaneous multi-level training. We show that the grooming algorithm derived from the deep RL agent can match state-of-the-art techniques used at the Large Hadron Collider, resulting in improved mass resolution for boosted objects. Given a suitable reward function, the agent learns how to train a policy which optimally removes soft wide-angle radiation, allowing for a modular grooming technique that can be applied in a wide range of contexts. These results are accessible through the corresponding GroomRL framework.
Machine Learning in High Energy Physics Community White Paper
Jul 08, 2018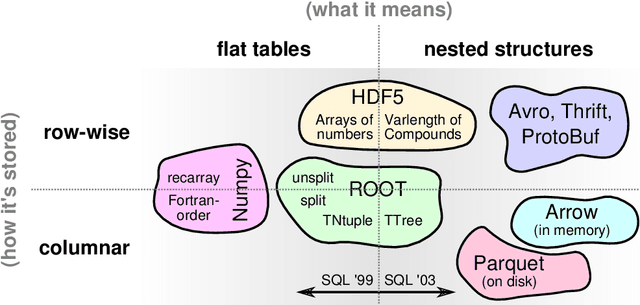
Machine learning is an important research area in particle physics, beginning with applications to high-level physics analysis in the 1990s and 2000s, followed by an explosion of applications in particle and event identification and reconstruction in the 2010s. In this document we discuss promising future research and development areas in machine learning in particle physics with a roadmap for their implementation, software and hardware resource requirements, collaborative initiatives with the data science community, academia and industry, and training the particle physics community in data science. The main objective of the document is to connect and motivate these areas of research and development with the physics drivers of the High-Luminosity Large Hadron Collider and future neutrino experiments and identify the resource needs for their implementation. Additionally we identify areas where collaboration with external communities will be of great benefit.
Sampling the Riemann-Theta Boltzmann Machine
Apr 20, 2018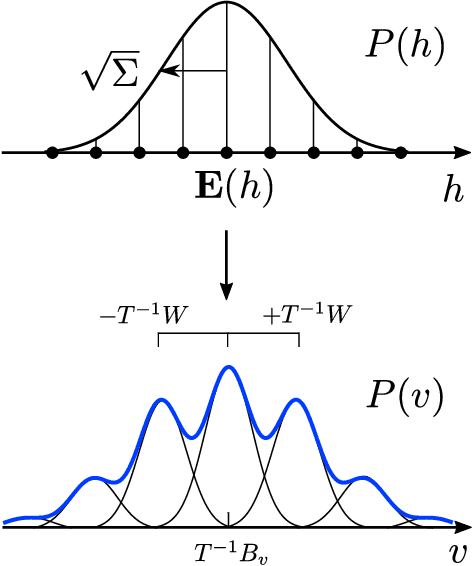
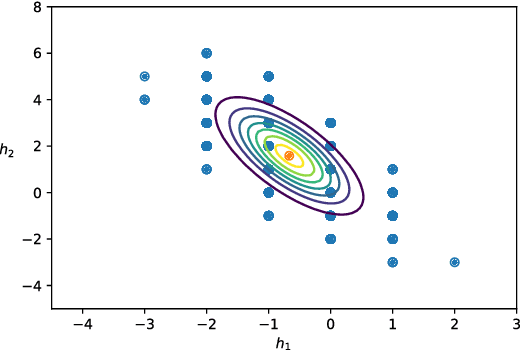
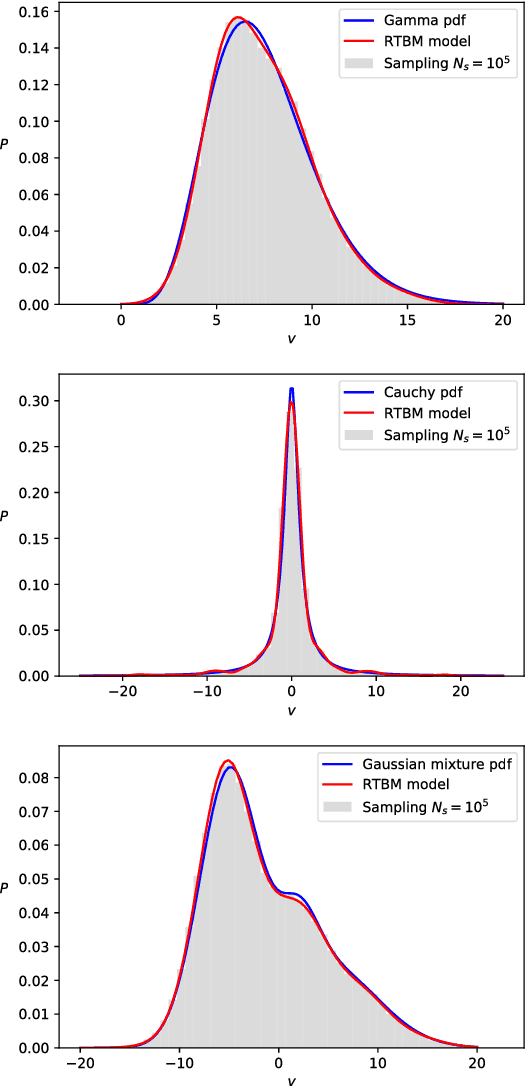
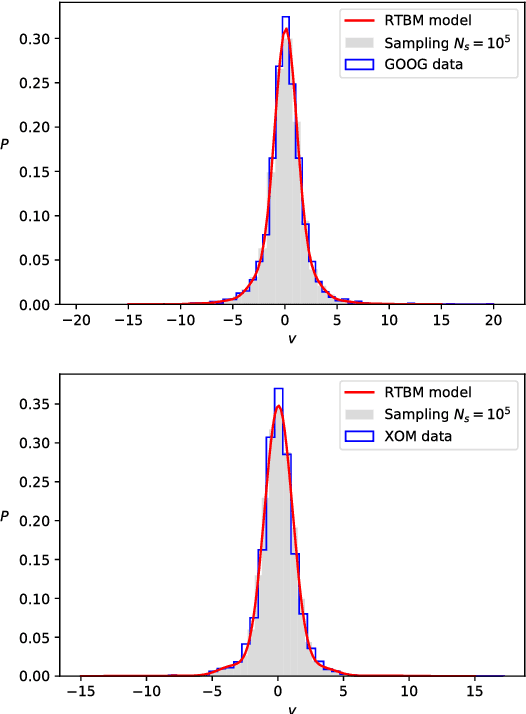
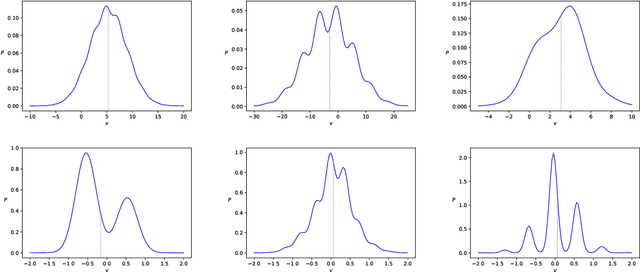
We show that the visible sector probability density function of the Riemann-Theta Boltzmann machine corresponds to a gaussian mixture model consisting of an infinite number of component multi-variate gaussians. The weights of the mixture are given by a discrete multi-variate gaussian over the hidden state space. This allows us to sample the visible sector density function in a straight-forward manner. Furthermore, we show that the visible sector probability density function possesses an affine transform property, similar to the multi-variate gaussian density.
Riemann-Theta Boltzmann Machine
Apr 06, 2018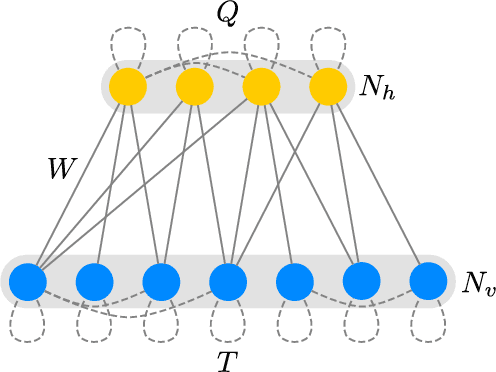
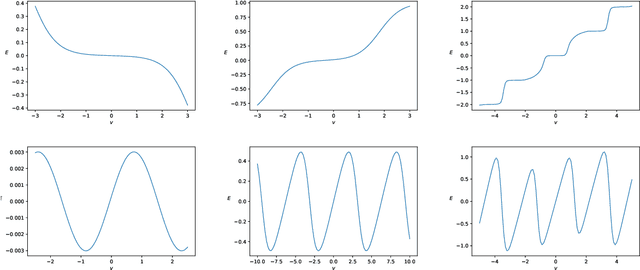
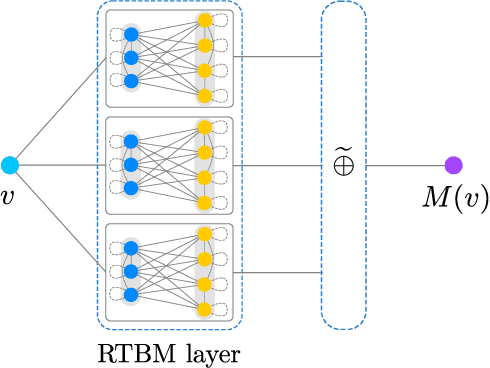
A general Boltzmann machine with continuous visible and discrete integer valued hidden states is introduced. Under mild assumptions about the connection matrices, the probability density function of the visible units can be solved for analytically, yielding a novel parametric density function involving a ratio of Riemann-Theta functions. The conditional expectation of a hidden state for given visible states can also be calculated analytically, yielding a derivative of the logarithmic Riemann-Theta function. The conditional expectation can be used as activation function in a feedforward neural network, thereby increasing the modelling capacity of the network. Both the Boltzmann machine and the derived feedforward neural network can be successfully trained via standard gradient- and non-gradient-based optimization techniques.