 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLCNet: An end-to-end deep learning framework for simultaneous online calibration of LiDAR, RADAR, and Camera
Dec 09, 2025



Accurate extrinsic calibration of LiDAR, RADAR, and camera sensors is essential for reliable perception in autonomous vehicles. Still, it remains challenging due to factors such as mechanical vibrations and cumulative sensor drift in dynamic environments. This paper presents RLCNet, a novel end-to-end trainable deep learning framework for the simultaneous online calibration of these multimodal sensors. Validated on real-world datasets, RLCNet is designed for practical deployment and demonstrates robust performance under diverse conditions. To support real-time operation, an online calibration framework is introduced that incorporates a weighted moving average and outlier rejection, enabling dynamic adjustment of calibration parameters with reduced prediction noise and improved resilience to drift. An ablation study highlights the significance of architectural choices, while comparisons with existing methods demonstrate the superior accuracy and robustness of the proposed approach.
Bayesian Optimization applied for accelerated Virtual Validation of the Autonomous Driving Function
Jul 30, 2025Rigorous Verification and Validation (V&V) of Autonomous Driving Functions (ADFs) is paramount for ensuring the safety and public acceptance of Autonomous Vehicles (AVs). Current validation relies heavily on simulation to achieve sufficient test coverage within the Operational Design Domain (ODD) of a vehicle, but exhaustively exploring the vast parameter space of possible scenarios is computationally expensive and time-consuming. This work introduces a framework based on Bayesian Optimization (BO) to accelerate the discovery of critical scenarios. We demonstrate the effectiveness of the framework on an Model Predictive Controller (MPC)-based motion planner, showing that it identifies hazardous situations, such as off-road events, using orders of magnitude fewer simulations than brute-force Design of Experiments (DoE) methods. Furthermore, this study investigates the scalability of the framework in higher-dimensional parameter spaces and its ability to identify multiple, distinct critical regions within the ODD of the motion planner used as the case study .
Joint Travel Route Optimization Framework for Platooning
Apr 10, 2025



Platooning represents an advanced driving technology designed to assist drivers in traffic convoys of varying lengths, enhancing road safety, reducing driver fatigue, and improving fuel efficiency. Sophisticated automated driving assistance systems have facilitated this innovation. Recent advancements in platooning emphasize cooperative mechanisms within both centralized and decentralized architectures enabled by vehicular communication technologies. This study introduces a cooperative route planning optimization framework aimed at promoting the adoption of platooning through a centralized platoon formation strategy at the system level. This approach is envisioned as a transitional phase from individual (ego) driving to fully collaborative driving. Additionally, this research formulates and incorporates travel cost metrics related to fuel consumption, driver fatigue, and travel time, considering regulatory constraints on consecutive driving durations. The performance of these cost metrics has been evaluated using Dijkstra's and A* shortest path algorithms within a network graph framework. The results indicate that the proposed architecture achieves an average cost improvement of 14 % compared to individual route planning for long road trips.
Tactical Game-theoretic Decision-making with Homotopy Class Constraints
Jun 19, 2024



We propose a tactical homotopy-aware decision-making framework for game-theoretic motion planning in urban environments. We model urban driving as a generalized Nash equilibrium problem and employ a mixed-integer approach to tame the combinatorial aspect of motion planning. More specifically, by utilizing homotopy classes, we partition the high-dimensional solution space into finite, well-defined subregions. Each subregion (homotopy) corresponds to a high-level tactical decision, such as the passing order between pairs of players. The proposed formulation allows to find global optimal Nash equilibria in a computationally tractable manner by solving a mixed-integer quadratic program. Each homotopy decision is represented by a binary variable that activates different sets of linear collision avoidance constraints. This extra homotopic constraint allows to find solutions in a more efficient way (on a roundabout scenario on average 5-times faster). We experimentally validate the proposed approach on scenarios taken from the rounD dataset. Simulation-based testing in receding horizon fashion demonstrates the capability of the framework in achieving globally optimal solutions while yielding a 78% average decrease in the computational time with respect to an implementation without the homotopic constraints.
Vehicle State Estimation through Modular Factor Graph-based Fusion of Multiple Sensors
Aug 09, 2023



This study focuses on the critical aspect of robust state estimation for the safe navigation of an Autonomous Vehicle (AV). Existing literature primarily employs two prevalent techniques for state estimation, namely filtering-based and graph-based approaches. Factor Graph (FG) is a graph-based approach, constructed using Values and Factors for Maximum Aposteriori (MAP) estimation, that offers a modular architecture that facilitates the integration of inputs from diverse sensors. However, most FG-based architectures in current use require explicit knowledge of sensor parameters and are designed for single setups. To address these limitations, this research introduces a novel plug-and-play FG-based state estimator capable of operating without predefined sensor parameters. This estimator is suitable for deployment in multiple sensor setups, offering convenience and providing comprehensive state estimation at a high frequency, including mean and covariances. The proposed algorithm undergoes rigorous validation using various sensor setups on two different vehicles: a quadricycle and a shuttle bus. The algorithm provides accurate and robust state estimation across diverse scenarios, even when faced with degraded Global Navigation Satellite System (GNSS) measurements or complete outages. These findings highlight the efficacy and reliability of the algorithm in real-world AV applications.
A Map-Free LiDAR-Based System for Autonomous Navigation in Vineyards
Jul 06, 2023



Agricultural robots have the potential to increase production yields and reduce costs by performing repetitive and time-consuming tasks. However, for robots to be effective, they must be able to navigate autonomously in fields or orchards without human intervention. In this paper, we introduce a navigation system that utilizes LiDAR and wheel encoder sensors for in-row, turn, and end-row navigation in row structured agricultural environments, such as vineyards. Our approach exploits the simple and precise geometrical structure of plants organized in parallel rows. We tested our system in both simulated and real environments, and the results demonstrate the effectiveness of our approach in achieving accurate and robust navigation. Our navigation system achieves mean displacement errors from the center line of 0.049 m and 0.372 m for in-row navigation in the simulated and real environments, respectively. In addition, we developed an end-row points detection that allows end-row navigation in vineyards, a task often ignored by most works.
Extended Object Tracking in Curvilinear Road Coordinates for Autonomous Driving
Feb 08, 2022
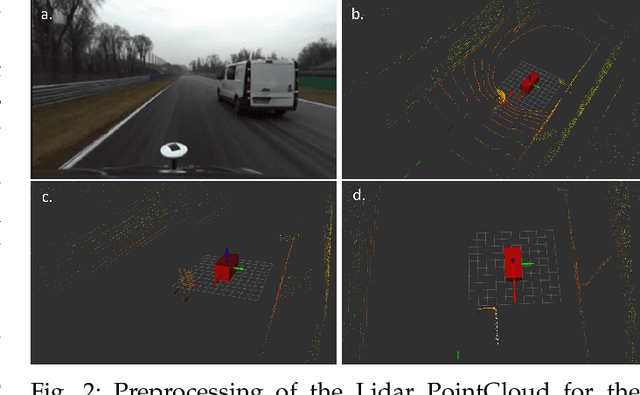
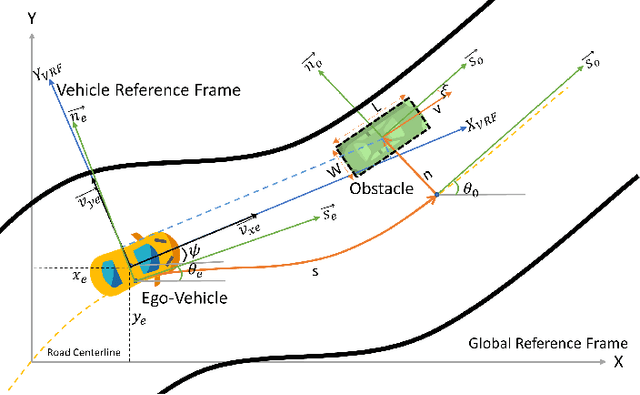
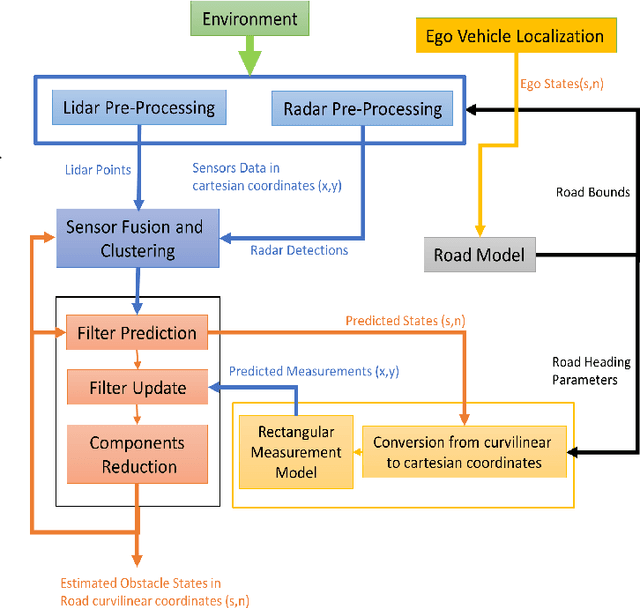
In literature, Extended Object Tracking (EOT) algorithms developed for autonomous driving predominantly provide obstacles state estimation in cartesian coordinates in the Vehicle Reference Frame. However, in many scenarios, state representation in road-aligned curvilinear coordinates is preferred when implementing autonomous driving subsystems like cruise control, lane-keeping assist, platooning, etc. This paper proposes a Gaussian Mixture Probability Hypothesis Density~(GM-PHD) filter with an Unscented Kalman Filter~(UKF) estimator that provides obstacle state estimates in curvilinear road coordinates. We employ a hybrid sensor fusion architecture between Lidar and Radar sensors to obtain rich measurement point representations for EOT. The measurement model for the UKF estimator is developed with the integration of coordinate conversion from curvilinear road coordinates to cartesian coordinates by using cubic hermit spline road model. The proposed algorithm is validated through Matlab Driving Scenario Designer simulation and experimental data collected at Monza Eni Circuit.
Control of a Hexapod Robot Considering Terrain Interaction
Dec 19, 2021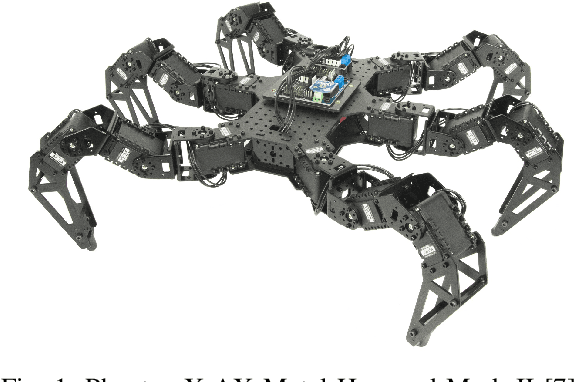
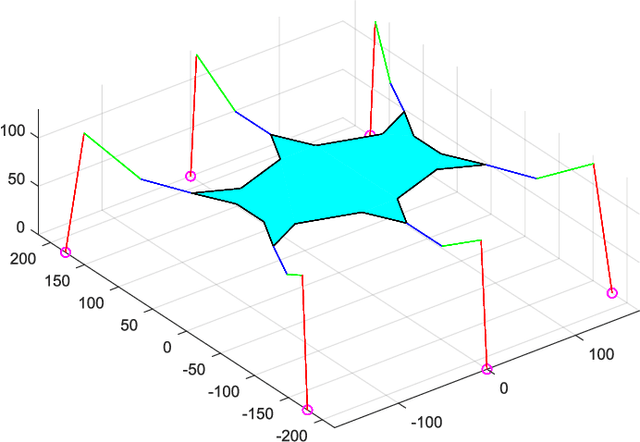
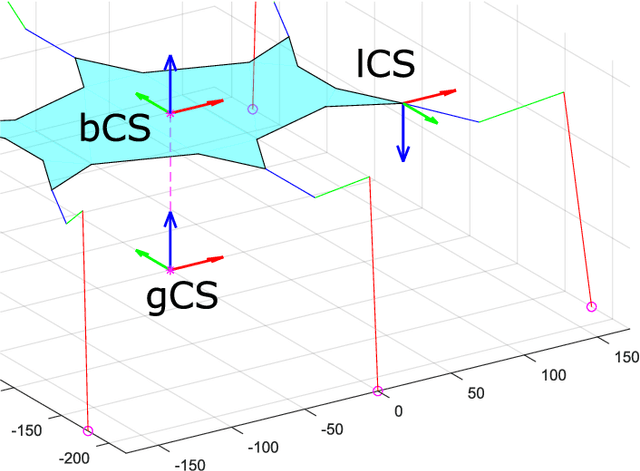
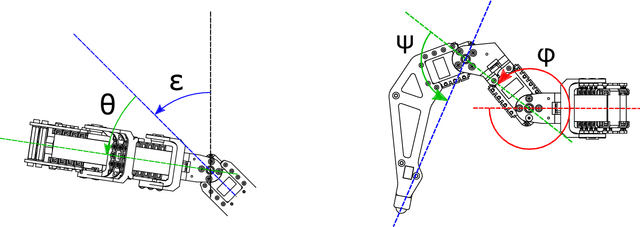
Bio-inspired walking hexapod robots are a relatively young branch in robotics in both state of the art and applications. Despite their high degree of flexibility and adaptability derived by their redundant design, the research field that compliments their abilities is still very lacking. In this paper will be proposed state-of-the-art hexapod robot specific control architecture that allows for full control over robot speed, body orientation and walk gait type to employ. Furthermore terrain interaction will be deeply investigated, leading to the development of a terrain-adapting control algorithm that will allow the robot to react swiftly to terrain shape and asperities such as non-linearities and non-continuity within the workspace. It will be presented a dynamic model derived from the interpretation of the hexapod movement to be comparable to these of the base-platform PKM machines, and said model will be validated through Matlab SimMechanicsTM physics simulation. A feed-back control system able to recognize leg-terrain touch and react accordingly to assure movement stability will then be developed. Finally results coming from an experimental campaign based of the PhantomX AX Metal Hexapod Mark II robotic platform by Trossen RoboticsTM is reported.
Two algorithms for vehicular obstacle detection in sparse pointcloud
Sep 15, 2021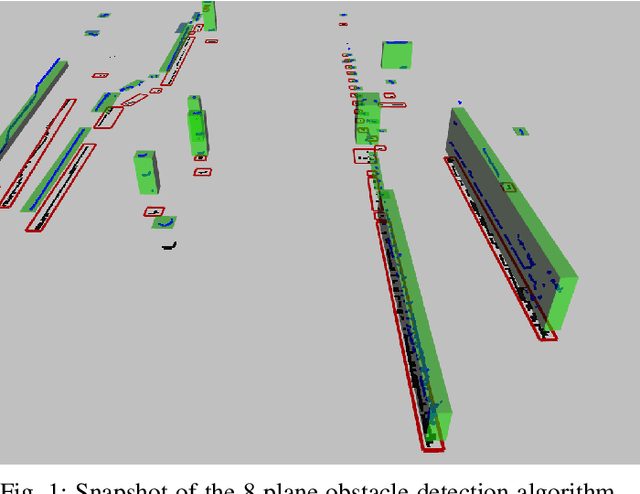

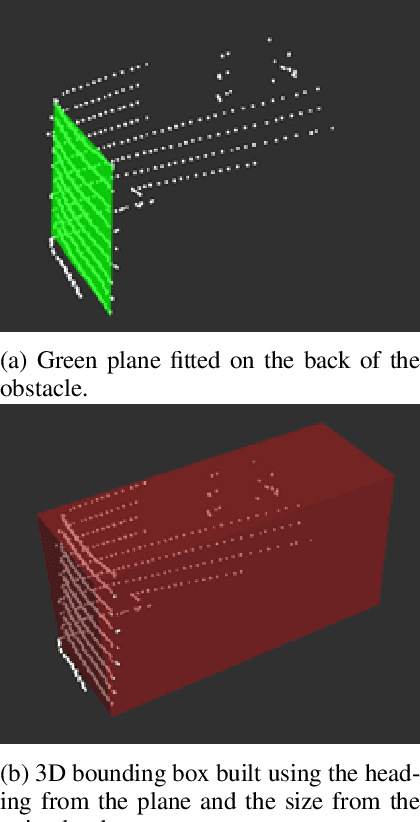
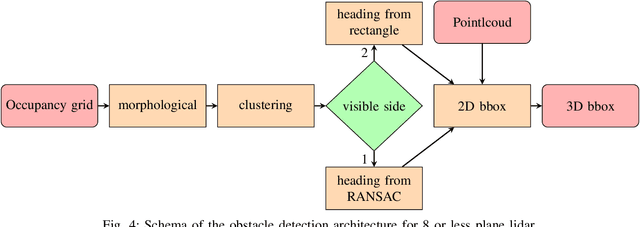
One of the main components of an autonomous vehicle is the obstacle detection pipeline. Most prototypes, both from research and industry, rely on lidars for this task. Pointcloud information from lidar is usually combined with data from cameras and radars, but the backbone of the architecture is mainly based on 3D bounding boxes computed from lidar data. To retrieve an accurate representation, sensors with many planes, e.g., greater than 32 planes, are usually employed. The returned pointcloud is indeed dense and well defined, but high-resolution sensors are still expensive and often require powerful GPUs to be processed. Lidars with fewer planes are cheaper, but the returned data are not dense enough to be processed with state of the art deep learning approaches to retrieve 3D bounding boxes. In this paper, we propose two solutions based on occupancy grid and geometric refinement to retrieve a list of 3D bounding boxes employing lidar with a low number of planes (i.e., 16 and 8 planes). Our solutions have been validated on a custom acquired dataset with accurate ground truth to prove its feasibility and accuracy.
Design of a prototypical platform for autonomous and connected vehicles
Jun 17, 2021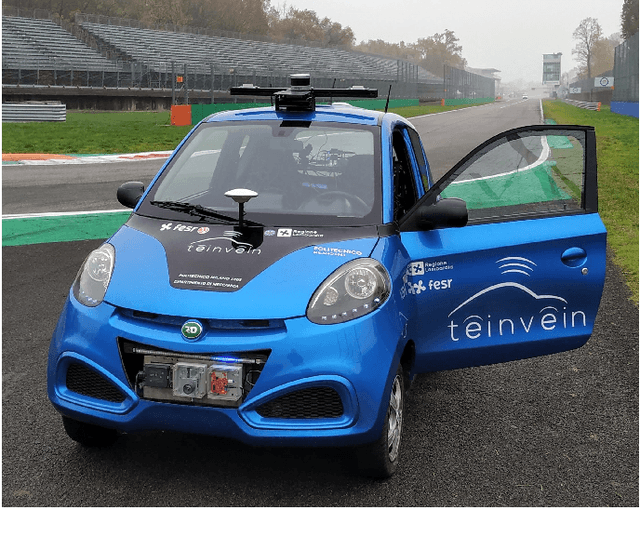
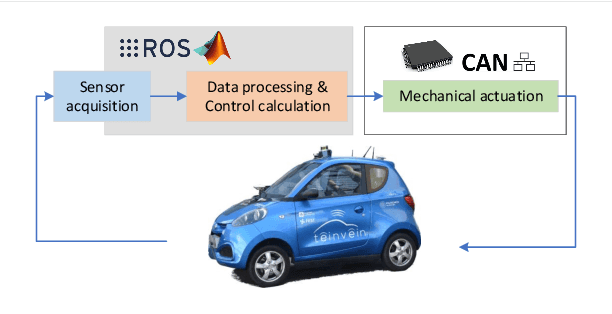
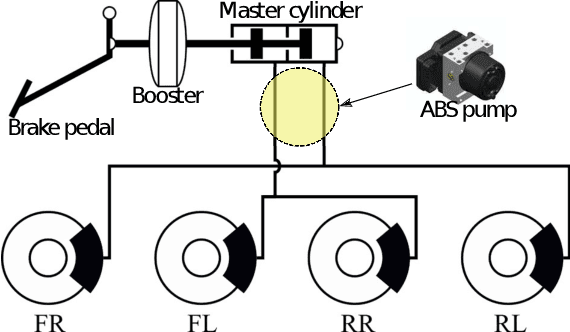
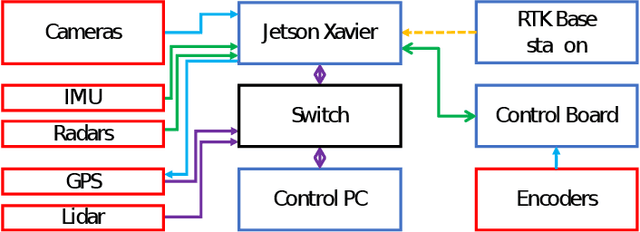
Self-driving technology is expected to revolutionize different sectors and is seen as the natural evolution of road vehicles. In the last years, real-world validation of designed and virtually tested solutions is growing in importance since simulated environments will never fully replicate all the aspects that can affect results in the real world. To this end, this paper presents our prototype platform for experimental research on connected and autonomous driving projects. In detail, the paper presents the overall architecture of the vehicle focusing both on mechanical aspects related to remote actuation and sensors set-up and software aspects by means of a comprehensive description of the main algorithms required for autonomous driving as ego-localization, environment perception, motion planning, and actuation. Finally, experimental tests conducted in an urban-like environment are reported to validate and assess the performances of the overall system.