 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Display with Perspective Projection of Surroundings in Vehicle Teleoperation to Account Time-delays
Nov 22, 2022



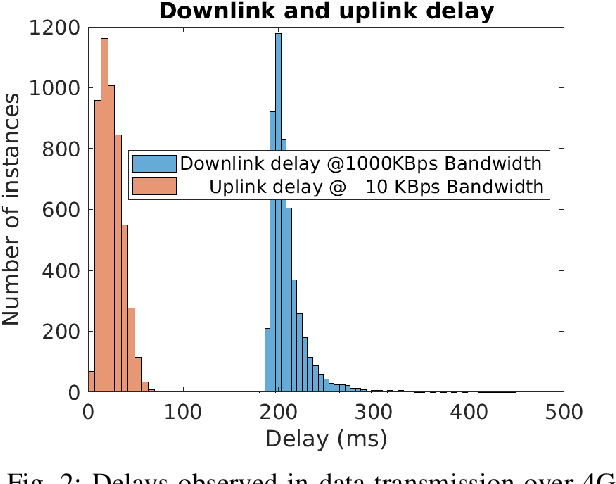
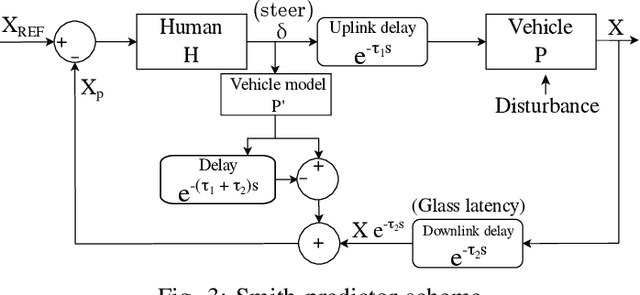
Teleoperation provides human operator sophisticated perceptual and cognitive skills into an over the network control loop. It gives hope of addressing some challenges related to vehicular autonomy which is based on artificial intelligence by providing a backup plan. Variable network time delays in data transmission is the major problem in teleoperating a vehicle. On 4G network, variability of these delays is high. Due to this, both video streaming and driving commands encounter variable time delay. This paper presents an approach of providing the human operator a forecast video stream which replicates future perspective of vehicle field of view accounting the delay present in the network. Regarding the image transformation, perspective projection technique is combined with correction given by smith predictor in the control loop. This image transformation accounts current time delay and tries to address both issues, time delays as well as its variability. For experiment sake, only frontward field of view is forecast. Performance is evaluated by performing online vehicle teleoperation on street edge case maneuvers and later comparing the path deviation with and without perspective projection.
Vehicle Teleoperation: Successive Reference-Pose Tracking
Jun 08, 2022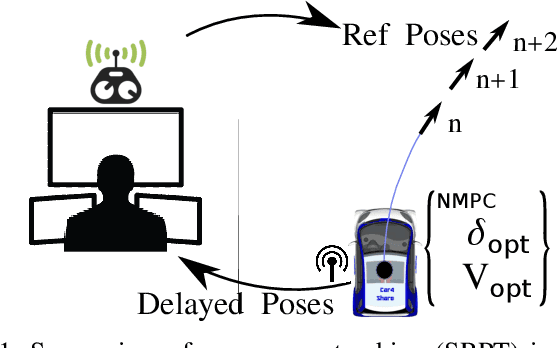
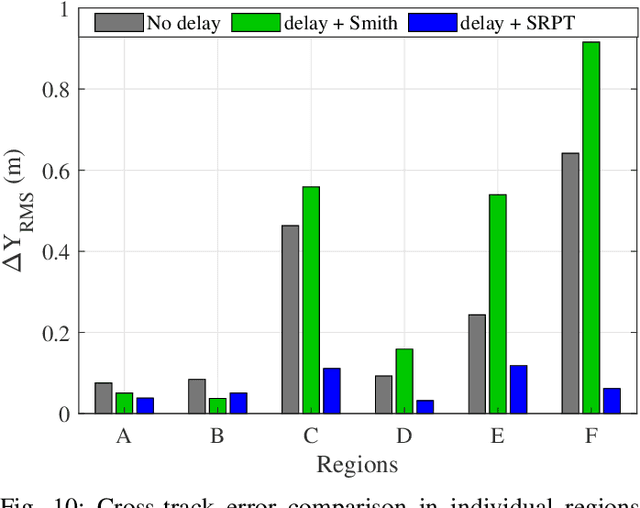
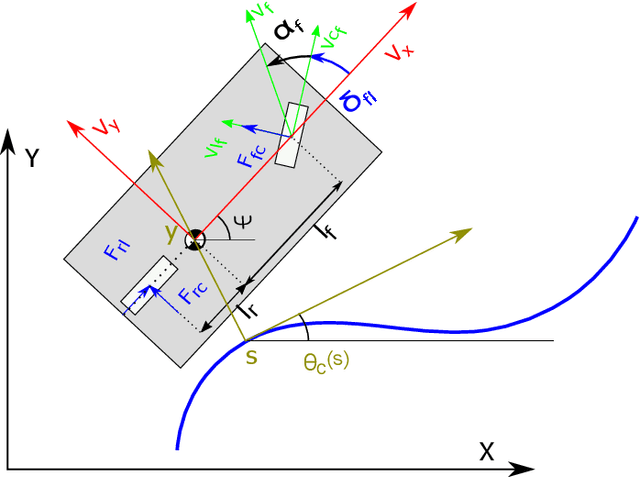
Vehicle teleoperation is an interesting feature in many fields. A typical problem of teleoperation is communication time delay which, together with actuator saturation and environmental disturbance, can cause a vehicle deviation from the target trajectory imposed by the human operator who imposes to the vehicle a steering wheel angle reference and a speed/acceleration reference. With predictive techniques, time-delay can be accounted at sufficient extent. But, in presence of disturbances, due to the absence of instantaneous haptic and visual feedback, human-operator steering command transmitted to the the vehicle is unaccounted with disturbances observed by the vehicle. To improve reference tracking without losing promptness in driving control, reference trajectory in the form of successive reference poses can be transmitted instead of steering commands to the vehicle. We introduce this new concept, namely, the 'successive reference-pose tracking (SRPT)' to improve path tracking in vehicle teleoperation. This paper discusses feasibility and advantages of this new method, compare to the smith predictor control approach. Simulations are performed in SIMULINK environment, where a 14-dof vehicle model is being controlled with Smith and SRPT controllers in presence of variable network delay. Scenarios for performance comparison are low adhesion ground, strong lateral wind and steer-rate demanding maneuvers. Simulation result shows significant improvement in reference tracking with SRPT approach.
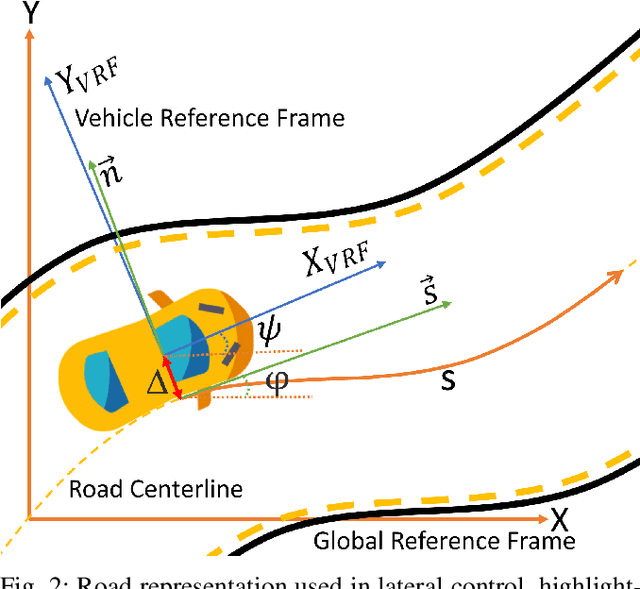
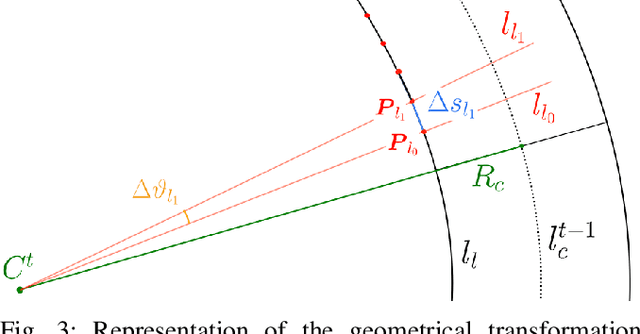
Extended Object Tracking in Curvilinear Road Coordinates for Autonomous Driving
Feb 08, 2022
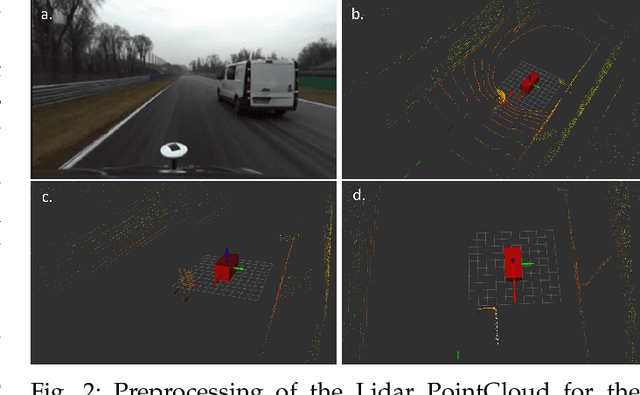
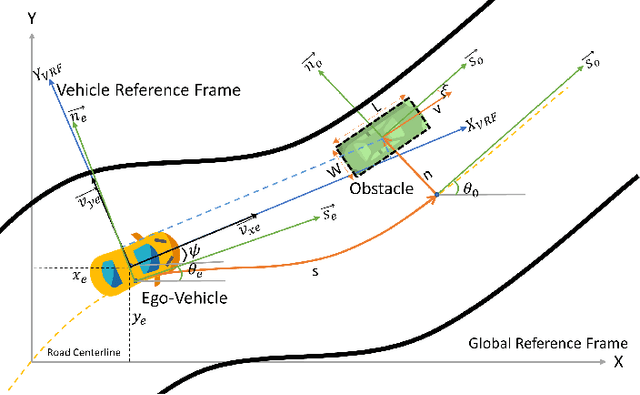
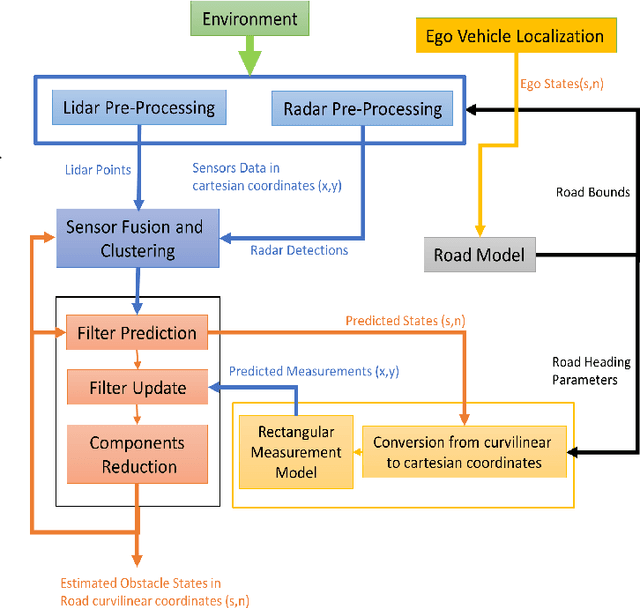
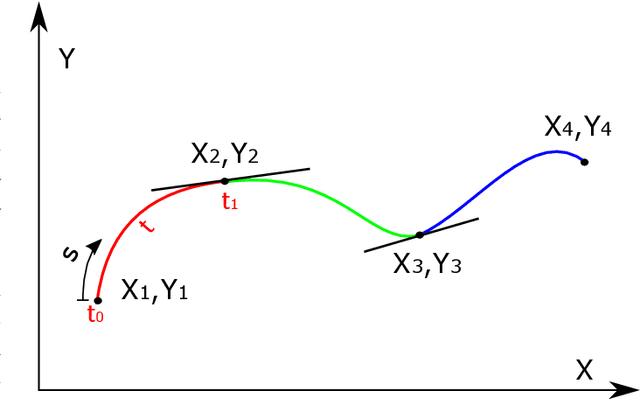
In literature, Extended Object Tracking (EOT) algorithms developed for autonomous driving predominantly provide obstacles state estimation in cartesian coordinates in the Vehicle Reference Frame. However, in many scenarios, state representation in road-aligned curvilinear coordinates is preferred when implementing autonomous driving subsystems like cruise control, lane-keeping assist, platooning, etc. This paper proposes a Gaussian Mixture Probability Hypothesis Density~(GM-PHD) filter with an Unscented Kalman Filter~(UKF) estimator that provides obstacle state estimates in curvilinear road coordinates. We employ a hybrid sensor fusion architecture between Lidar and Radar sensors to obtain rich measurement point representations for EOT. The measurement model for the UKF estimator is developed with the integration of coordinate conversion from curvilinear road coordinates to cartesian coordinates by using cubic hermit spline road model. The proposed algorithm is validated through Matlab Driving Scenario Designer simulation and experimental data collected at Monza Eni Circuit.
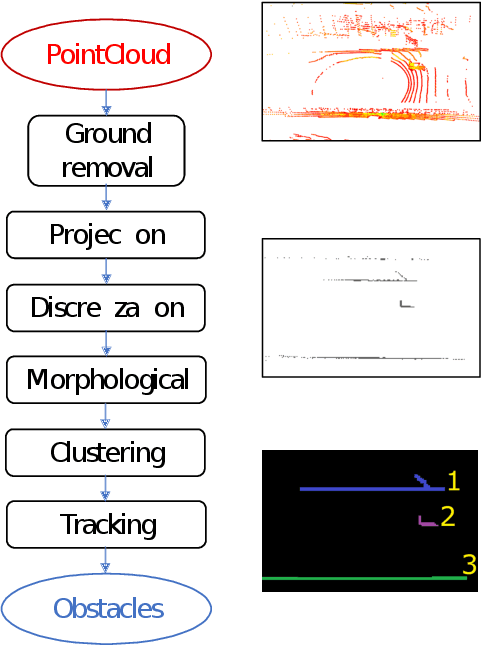
Two algorithms for vehicular obstacle detection in sparse pointcloud
Sep 15, 2021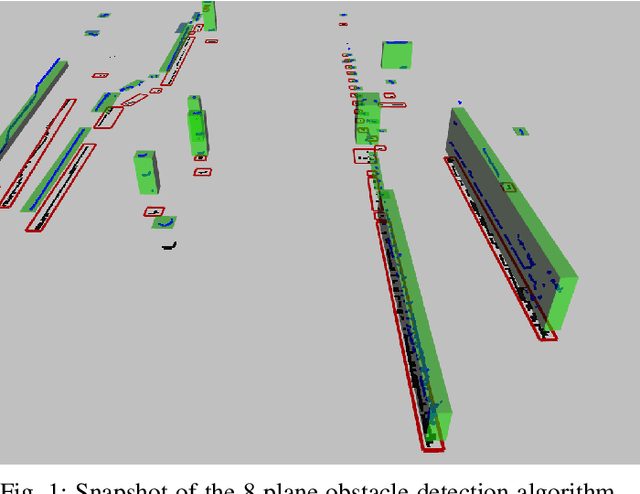

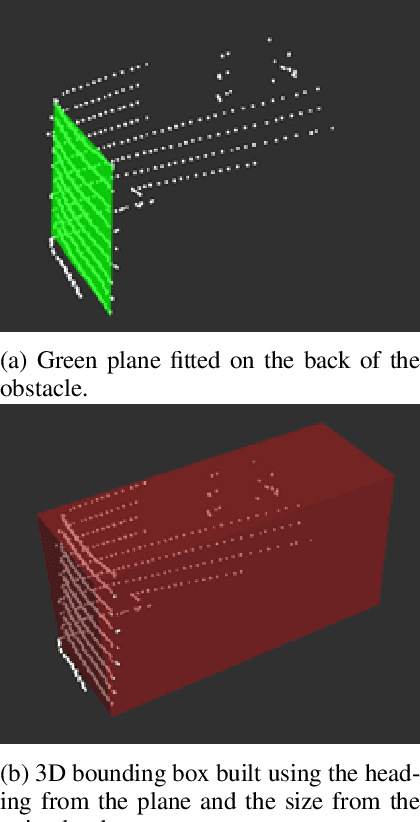
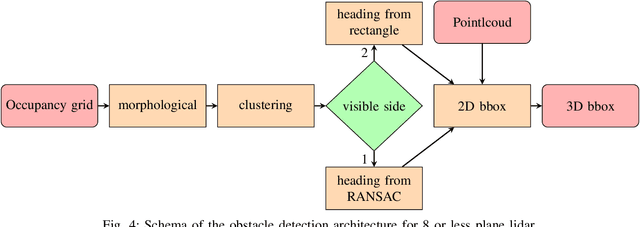
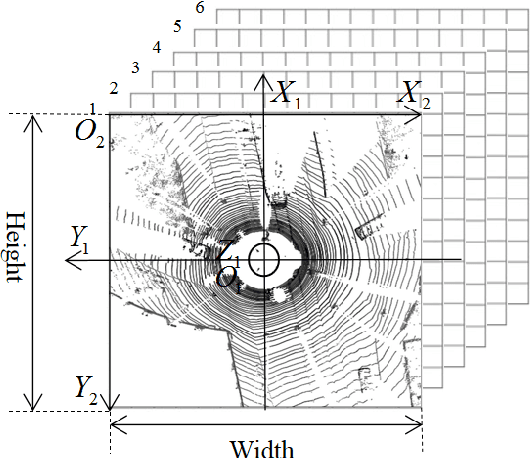
One of the main components of an autonomous vehicle is the obstacle detection pipeline. Most prototypes, both from research and industry, rely on lidars for this task. Pointcloud information from lidar is usually combined with data from cameras and radars, but the backbone of the architecture is mainly based on 3D bounding boxes computed from lidar data. To retrieve an accurate representation, sensors with many planes, e.g., greater than 32 planes, are usually employed. The returned pointcloud is indeed dense and well defined, but high-resolution sensors are still expensive and often require powerful GPUs to be processed. Lidars with fewer planes are cheaper, but the returned data are not dense enough to be processed with state of the art deep learning approaches to retrieve 3D bounding boxes. In this paper, we propose two solutions based on occupancy grid and geometric refinement to retrieve a list of 3D bounding boxes employing lidar with a low number of planes (i.e., 16 and 8 planes). Our solutions have been validated on a custom acquired dataset with accurate ground truth to prove its feasibility and accuracy.
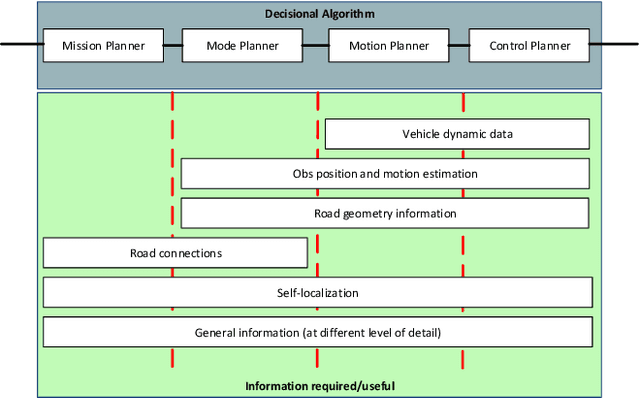
Design of a prototypical platform for autonomous and connected vehicles
Jun 17, 2021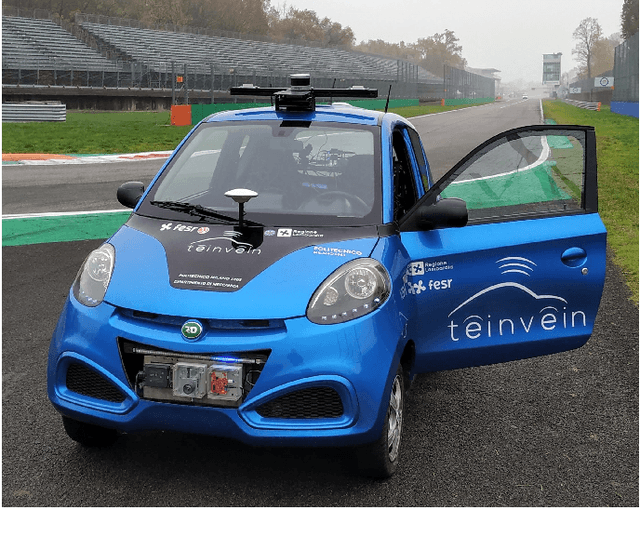
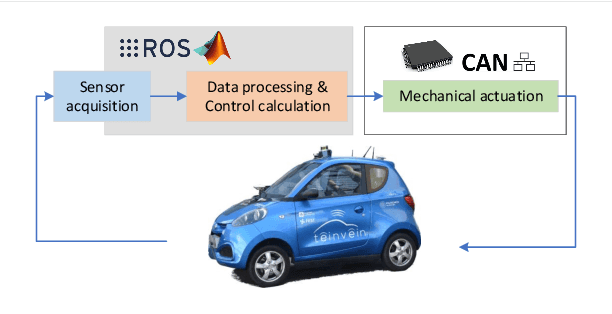
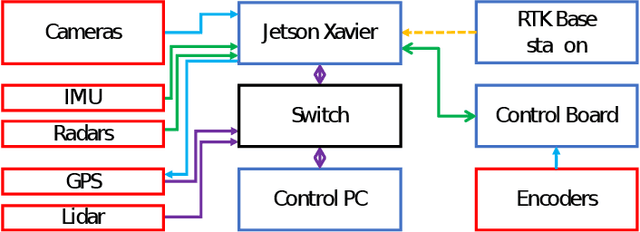
Self-driving technology is expected to revolutionize different sectors and is seen as the natural evolution of road vehicles. In the last years, real-world validation of designed and virtually tested solutions is growing in importance since simulated environments will never fully replicate all the aspects that can affect results in the real world. To this end, this paper presents our prototype platform for experimental research on connected and autonomous driving projects. In detail, the paper presents the overall architecture of the vehicle focusing both on mechanical aspects related to remote actuation and sensors set-up and software aspects by means of a comprehensive description of the main algorithms required for autonomous driving as ego-localization, environment perception, motion planning, and actuation. Finally, experimental tests conducted in an urban-like environment are reported to validate and assess the performances of the overall system.
NMPC trajectory planner for urban autonomous driving
May 09, 2021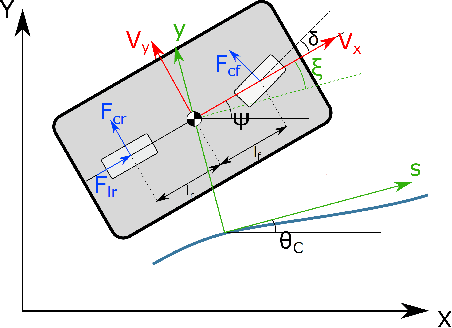
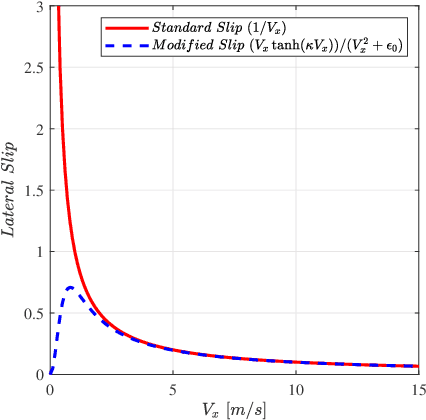
This paper presents a trajectory planner for autonomous driving based on a Nonlinear Model Predictive Control (NMPC) algorithm that accounts for Pacejka's nonlinear lateral tyre dynamics as well as for zero speed conditions through a novel slip angles calculation. In the NMPC framework, road boundaries and obstacles (both static and moving) are taken into account thanks to soft and hard constraints implementation. The numerical solution of the NMPC problem is carried out using ACADO toolkit coupled with the quadratic programming solver qpOASES. The effectiveness of the proposed NMPC trajectory planner has been tested using CarMaker multibody models. Time analysis results provided by the simulations shown, state that the proposed algorithm can be implemented on the real-time control framework of an autonomous vehicle under the assumption of data coming from an upstream estimation block.
Development and Simulation-based Testing of a 5G-Connected Intersection AEB System
Feb 02, 2021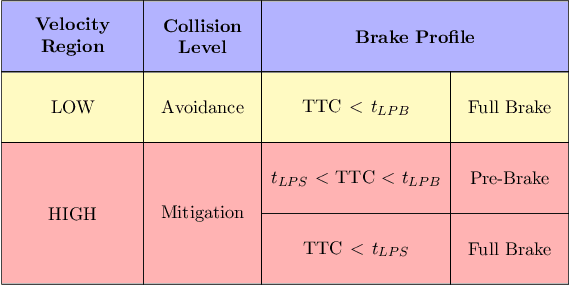
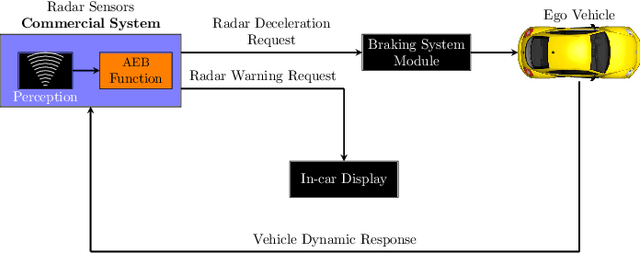
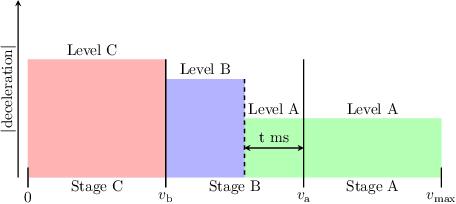
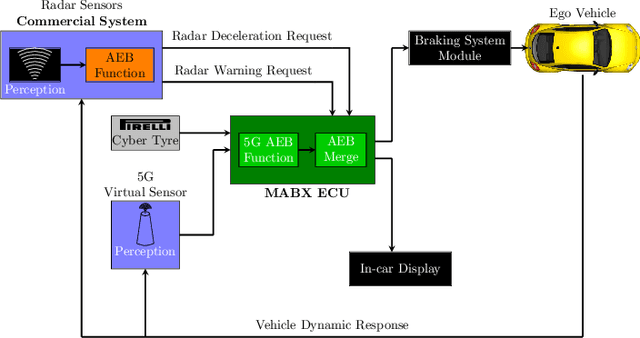
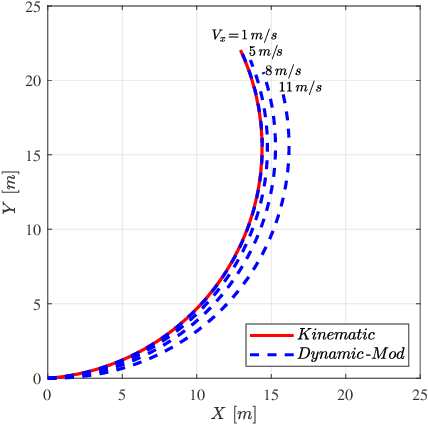
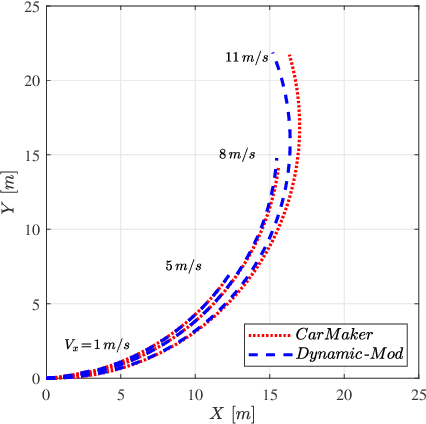
In Europe, 20% of road crashes occur at intersections. In recent years, evolving communication technologies are making V2V and V2I faster and more reliable; with such advancements, these crashes, as well as their economic cost, can be partially reduced. In this work, we concentrate on straight path intersection collisions. Connectivity-based algorithms relying on 5G technology and smart sensors are presented and compared to a commercial radar AEB logic in order to evaluate performances and effectiveness in collision avoidance or mitigation. The aforementioned novel safety systems are tested in a blind intersection and low adherence scenario. The first algorithm proposed is obtained by incorporating connectivity information to the original control scheme, while the second algorithm proposed is a novel control logic fully capable of utilizing also adherence estimation provided by smart sensors. Test results show an improvement in terms of safety for both the architecture and high prospects for future developments.
MPC path-planner for autonomous driving solved by genetic algorithm technique
Feb 01, 2021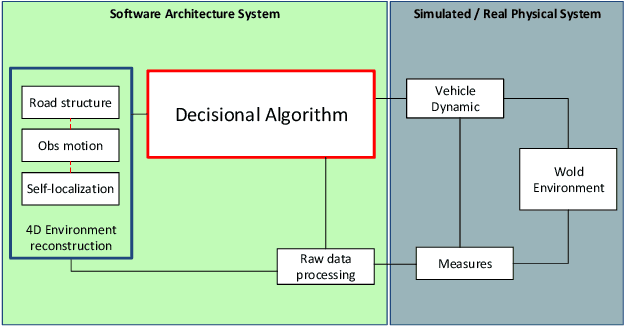
Autonomous vehicle's technology is expected to be disruptive for automotive industry in next years. This paper proposes a novel real-time trajectory planner based on a Nonlinear Model Predictive Control (NMPC) algorithm. A nonlinear single track vehicle model with Pacejka's lateral tyre formulas has been implemented. The numerical solution of the NMPC problem is obtained by means of the implementation of a novel genetic algorithm strategy. Numerical results are discussed through simulations that shown a reasonable behavior of the proposed strategy in presence of static or moving obstacles as well as in a wide rage of road friction conditions. Moreover a real-time implementation is made possible by the reported computational time analysis.
LiDAR point-cloud processing based on projection methods: a comparison
Aug 03, 2020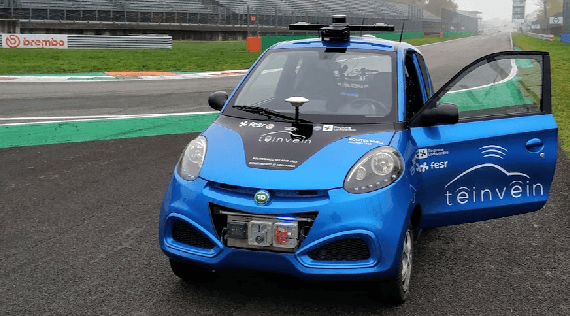
An accurate and rapid-response perception system is fundamental for autonomous vehicles to operate safely. 3D object detection methods handle point clouds given by LiDAR sensors to provide accurate depth and position information for each detection, together with its dimensions and classification. The information is then used to track vehicles and other obstacles in the surroundings of the autonomous vehicle, and also to feed control units that guarantee collision avoidance and motion planning. Nowadays, object detection systems can be divided into two main categories. The first ones are the geometric based, which retrieve the obstacles using geometric and morphological operations on the 3D points. The seconds are the deep learning-based, which process the 3D points, or an elaboration of the 3D point-cloud, with deep learning techniques to retrieve a set of obstacles. This paper presents a comparison between those two approaches, presenting one implementation of each class on a real autonomous vehicle. Accuracy of the estimates of the algorithms has been evaluated with experimental tests carried in the Monza ENI circuit. The position of the ego vehicle and the obstacle is given by GPS sensors with RTK correction, which guarantees an accurate ground truth for the comparison. Both algorithms have been implemented on ROS and run on a consumer laptop.
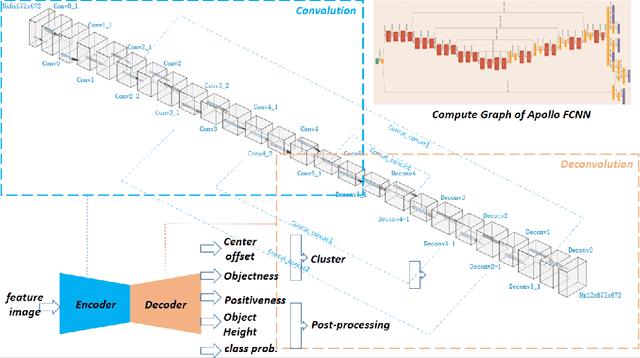
Advances in centerline estimation for autonomous lateral control
Feb 28, 2020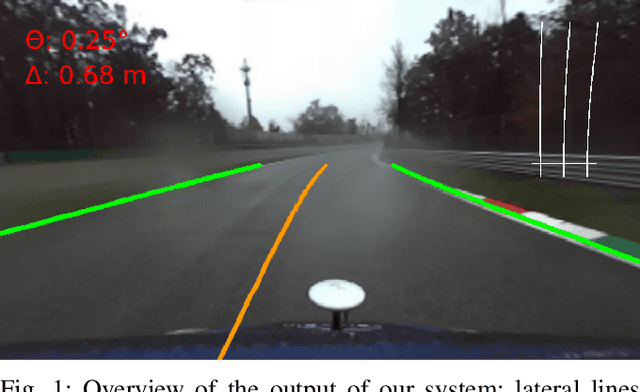
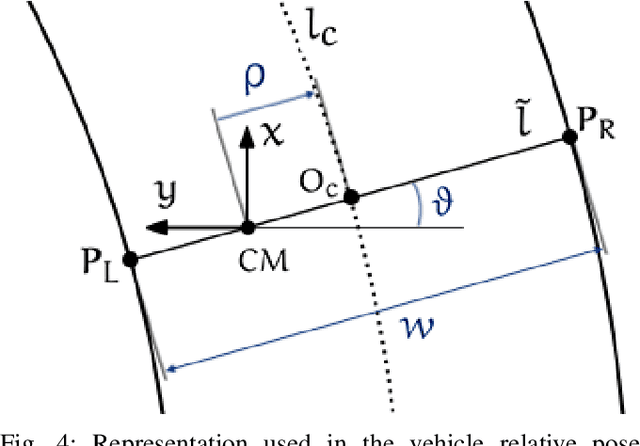
The ability of autonomous vehicles to maintain an accurate trajectory within their road lane is crucial for safe operation. This requires detecting the road lines and estimating the car relative pose within its lane. Lateral lines are usually computed from camera images. Still, most of the works on line detection are limited to image mask retrieval and do not provide a usable representation in world coordinates. What we propose in this paper is a complete perception pipeline able to retrieve, from a single image, all the information required by a vehicle lateral control system: road lines equation, centerline, vehicle heading and lateral displacement. We also evaluate our system by acquiring a new dataset with accurate geometric ground truth, and we make it publicly available to act as a benchmark for further research.