 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgents' Last Exam
Jun 03, 2026Recent AI systems have achieved strong results on a wide range of benchmarks, yet these gains have not translated into economically meaningful deployment across many professional domains. We argue that this gap is largely an evaluation problem: widely used benchmarks lack sustained performance measurement on real and economically valuable workflows. This paper introduces Agents' Last Exam (ALE), a benchmark designed to evaluate AI agents on long-horizon, economically valuable, real-world tasks with verifiable outcomes. Developed in collaboration with 250+ industry experts, ALE covers non-physical industries defined with reference to O*NET / SOC 2018 (the U.S. federal occupational taxonomy). It is organized around a task taxonomy with 55 subfields grouped into 13 industry clusters covering 1K+ tasks. Current results show that the hardest tier remains far from saturated: across mainstream harness and backbone configurations, the average full pass rate is 2.6%. ALE is designed as a living benchmark: its task pool grows continuously as new workflows and industries are onboarded. More broadly, ALE is intended not merely as another leaderboard, but as an instrument for closing the gap between benchmark success and GDP-relevant impact.
Guardian-regularized Safe Offline Reinforcement Learning for Smart Weaning of Mechanical Circulatory Devices
Nov 08, 2025We study the sequential decision-making problem for automated weaning of mechanical circulatory support (MCS) devices in cardiogenic shock patients. MCS devices are percutaneous micro-axial flow pumps that provide left ventricular unloading and forward blood flow, but current weaning strategies vary significantly across care teams and lack data-driven approaches. Offline reinforcement learning (RL) has proven to be successful in sequential decision-making tasks, but our setting presents challenges for training and evaluating traditional offline RL methods: prohibition of online patient interaction, highly uncertain circulatory dynamics due to concurrent treatments, and limited data availability. We developed an end-to-end machine learning framework with two key contributions (1) Clinically-aware OOD-regularized Model-based Policy Optimization (CORMPO), a density-regularized offline RL algorithm for out-of-distribution suppression that also incorporates clinically-informed reward shaping and (2) a Transformer-based probabilistic digital twin that models MCS circulatory dynamics for policy evaluation with rich physiological and clinical metrics. We prove that \textsf{CORMPO} achieves theoretical performance guarantees under mild assumptions. CORMPO attains a higher reward than the offline RL baselines by 28% and higher scores in clinical metrics by 82.6% on real and synthetic datasets. Our approach offers a principled framework for safe offline policy learning in high-stakes medical applications where domain expertise and safety constraints are essential.
Data-Driven Simulator for Mechanical Circulatory Support with Domain Adversarial Neural Process
May 28, 2024



Mechanical Circulatory Support (MCS) devices, implemented as a probabilistic deep sequence model. Existing mechanical simulators for MCS rely on oversimplifying assumptions and are insensitive to patient-specific behavior, limiting their applicability to real-world treatment scenarios. To address these shortcomings, our model Domain Adversarial Neural Process (DANP) employs a neural process architecture, allowing it to capture the probabilistic relationship between MCS pump levels and aortic pressure measurements with uncertainty. We use domain adversarial training to combine simulation data with real-world observations, resulting in a more realistic and diverse representation of potential outcomes. Empirical results with an improvement of 19% in non-stationary trend prediction establish DANP as an effective tool for clinicians to understand and make informed decisions regarding MCS patient treatment.
Copula Conformal Prediction for Multi-step Time Series Forecasting
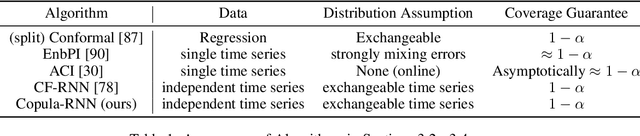
Dec 06, 2022Accurate uncertainty measurement is a key step to building robust and reliable machine learning systems. Conformal prediction is a distribution-free uncertainty quantification algorithm popular for its ease of implementation, statistical coverage guarantees, and versatility for underlying forecasters. However, existing conformal prediction algorithms for time series are limited to single-step prediction without considering the temporal dependency. In this paper we propose a Copula Conformal Prediction algorithm for multivariate, multi-step Time Series forecasting, CopulaCPTS. On several synthetic and real-world multivariate time series datasets, we show that CopulaCPTS produces more calibrated and sharp confidence intervals for multi-step prediction tasks than existing techniques.
Conformal Methods for Quantifying Uncertainty in Spatiotemporal Data: A Survey
Sep 08, 2022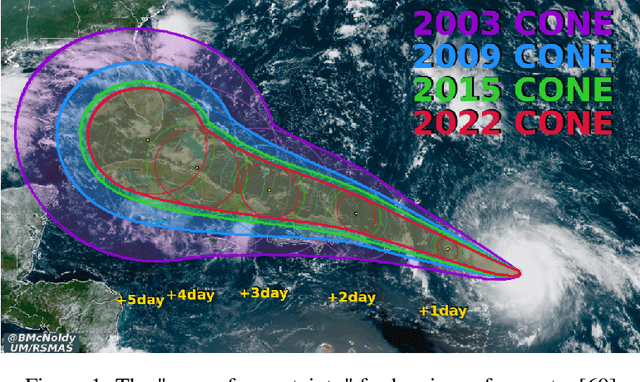
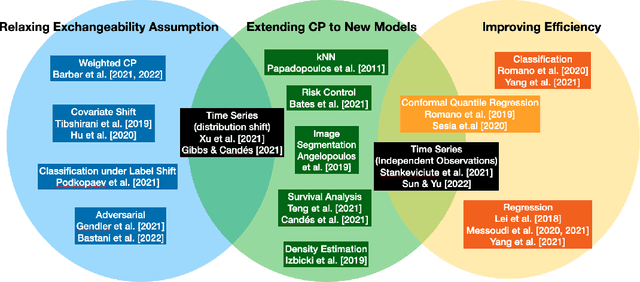
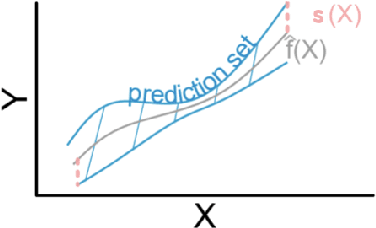
Machine learning methods are increasingly widely used in high-risk settings such as healthcare, transportation, and finance. In these settings, it is important that a model produces calibrated uncertainty to reflect its own confidence and avoid failures. In this paper we survey recent works on uncertainty quantification (UQ) for deep learning, in particular distribution-free Conformal Prediction method for its mathematical properties and wide applicability. We will cover the theoretical guarantees of conformal methods, introduce techniques that improve calibration and efficiency for UQ in the context of spatiotemporal data, and discuss the role of UQ in the context of safe decision making.
Probabilistic Symmetry for Improved Trajectory Forecasting
May 04, 2022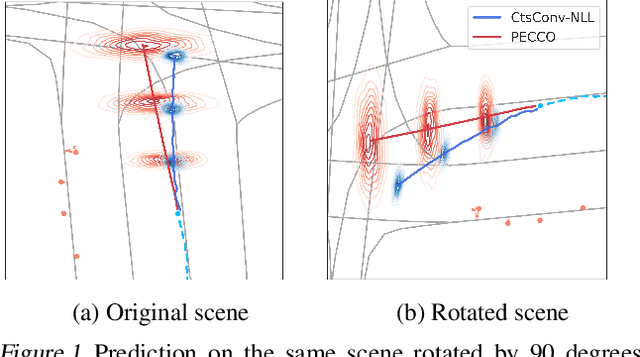
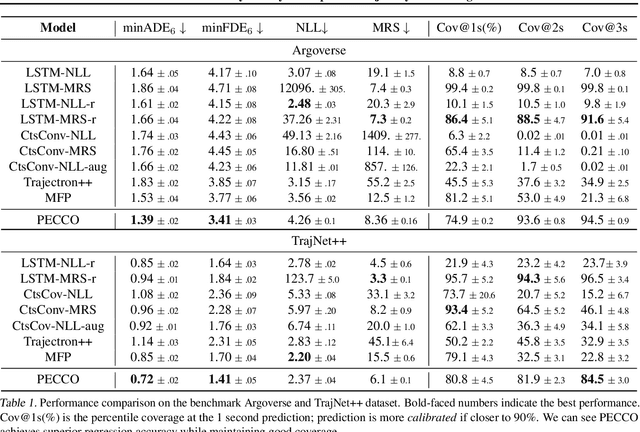
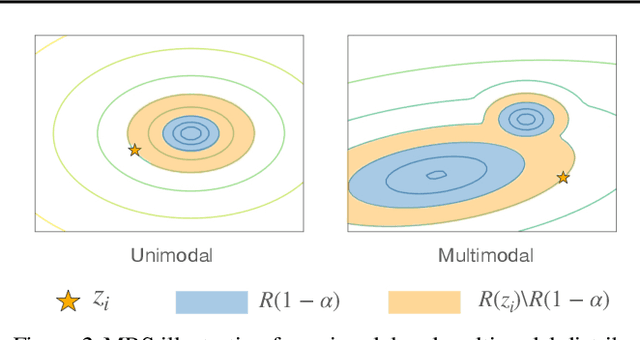

Trajectory prediction is a core AI problem with broad applications in robotics and autonomous driving. While most existing works focus on deterministic prediction, producing probabilistic forecasts to quantify prediction uncertainty is critical for downstream decision-making tasks such as risk assessment, motion planning, and safety guarantees. We introduce a new metric, mean regional score (MRS), to evaluate the quality of probabilistic trajectory forecasts. We propose a novel probabilistic trajectory prediction model, Probabilistic Equivariant Continuous COnvolution (PECCO) and show that leveraging symmetry, specifically rotation equivariance, can improve the predictions' accuracy as well as coverage. On both vehicle and pedestrian datasets, PECCO shows state-of-the-art prediction performance and improved calibration compared to baselines.