 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Optimize Package Picking for Large-Scale, Real-World Robot Induction
Jun 11, 2025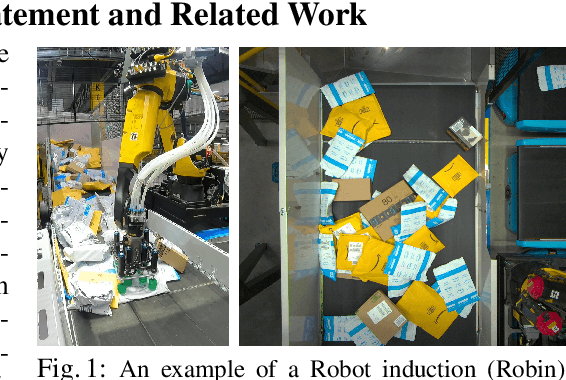


Warehouse automation plays a pivotal role in enhancing operational efficiency, minimizing costs, and improving resilience to workforce variability. While prior research has demonstrated the potential of machine learning (ML) models to increase picking success rates in large-scale robotic fleets by prioritizing high-probability picks and packages, these efforts primarily focused on predicting success probabilities for picks sampled using heuristic methods. Limited attention has been given, however, to leveraging data-driven approaches to directly optimize sampled picks for better performance at scale. In this study, we propose an ML-based framework that predicts transform adjustments as well as improving the selection of suction cups for multi-suction end effectors for sampled picks to enhance their success probabilities. The framework was integrated and evaluated in test workcells that resemble the operations of Amazon Robotics' Robot Induction (Robin) fleet, which is used for package manipulation. Evaluated on over 2 million picks, the proposed method achieves a 20\% reduction in pick failure rates compared to a heuristic-based pick sampling baseline, demonstrating its effectiveness in large-scale warehouse automation scenarios.