 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitively Diverse Multiple-Choice Question Generation: A Hybrid Multi-Agent Framework with Large Language Models
Feb 03, 2026Recent advances in large language models (LLMs) have made automated multiple-choice question (MCQ) generation increasingly feasible; however, reliably producing items that satisfy controlled cognitive demands remains a challenge. To address this gap, we introduce ReQUESTA, a hybrid, multi-agent framework for generating cognitively diverse MCQs that systematically target text-based, inferential, and main idea comprehension. ReQUESTA decomposes MCQ authoring into specialized subtasks and coordinates LLM-powered agents with rule-based components to support planning, controlled generation, iterative evaluation, and post-processing. We evaluated the framework in a large-scale reading comprehension study using academic expository texts, comparing ReQUESTA-generated MCQs with those produced by a single-pass GPT-5 zero-shot baseline. Psychometric analyses of learner responses assessed item difficulty and discrimination, while expert raters evaluated question quality across multiple dimensions, including topic relevance and distractor quality. Results showed that ReQUESTA-generated items were consistently more challenging, more discriminative, and more strongly aligned with overall reading comprehension performance. Expert evaluations further indicated stronger alignment with central concepts and superior distractor linguistic consistency and semantic plausibility, particularly for inferential questions. These findings demonstrate that hybrid, agentic orchestration can systematically improve the reliability and controllability of LLM-based generation, highlighting workflow design as a key lever for structured artifact generation beyond single-pass prompting.
Use of Python and Phoenix-M Interface in Robotics
Dec 31, 2010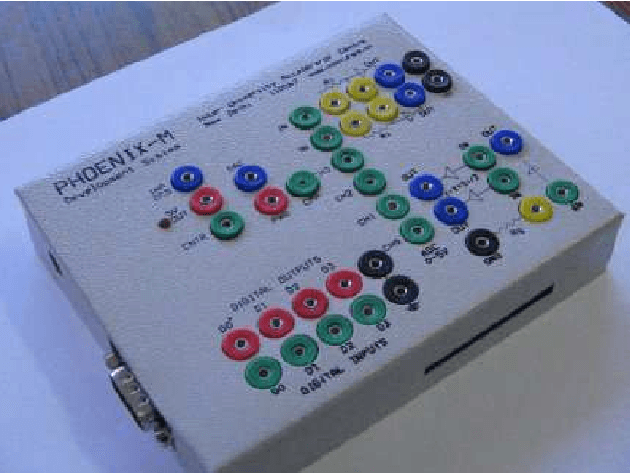
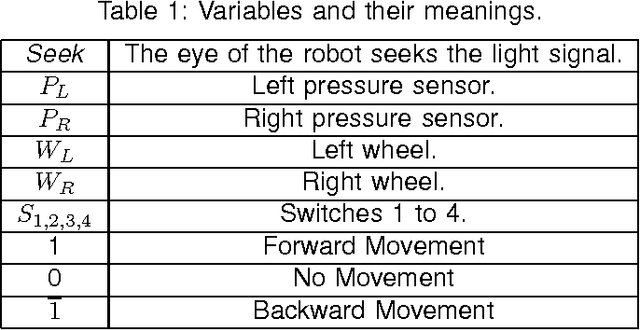
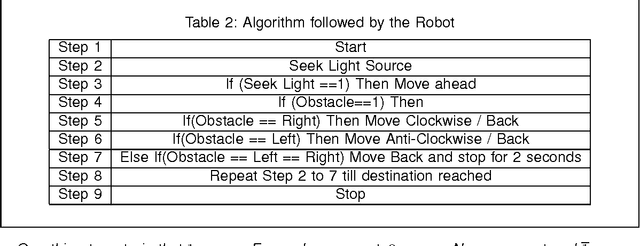
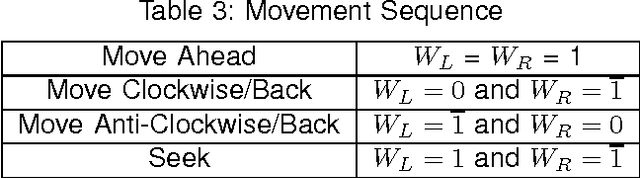
In this paper I will show how to use Python programming with a computer interface such as Phoenix-M 1 to drive simple robots. In my quest towards Artificial Intelligence(AI) I am experimenting with a lot of different possibilities in Robotics. This one will try to mimic the working of a simple insect's nervous system using hard wiring and some minimal software usage. This is the precursor to my advanced robotics and AI integration where I plan to use a new paradigm of AI based on Machine Learning and Self Consciousness via Knowledge Feedback and Update Process.