 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybridFlow: A Two-Step Generative Policy for Robotic Manipulation
Feb 14, 2026Limited by inference latency, existing robot manipulation policies lack sufficient real-time interaction capability with the environment. Although faster generation methods such as flow matching are gradually replacing diffusion methods, researchers are pursuing even faster generation suitable for interactive robot control. MeanFlow, as a one-step variant of flow matching, has shown strong potential in image generation, but its precision in action generation does not meet the stringent requirements of robotic manipulation. We therefore propose \textbf{HybridFlow}, a \textbf{3-stage method} with \textbf{2-NFE}: Global Jump in MeanFlow mode, ReNoise for distribution alignment, and Local Refine in ReFlow mode. This method balances inference speed and generation quality by leveraging the rapid advantage of MeanFlow one-step generation while ensuring action precision with minimal generation steps. Through real-world experiments, HybridFlow outperforms the 16-step Diffusion Policy by \textbf{15--25\%} in success rate while reducing inference time from 152ms to 19ms (\textbf{8$\times$ speedup}, \textbf{$\sim$52Hz}); it also achieves 70.0\% success on unseen-color OOD grasping and 66.3\% on deformable object folding. We envision HybridFlow as a practical low-latency method to enhance real-world interaction capabilities of robotic manipulation policies.
First Glance Diagnosis: Brain Disease Classification with Single fMRI Volume
Aug 10, 2022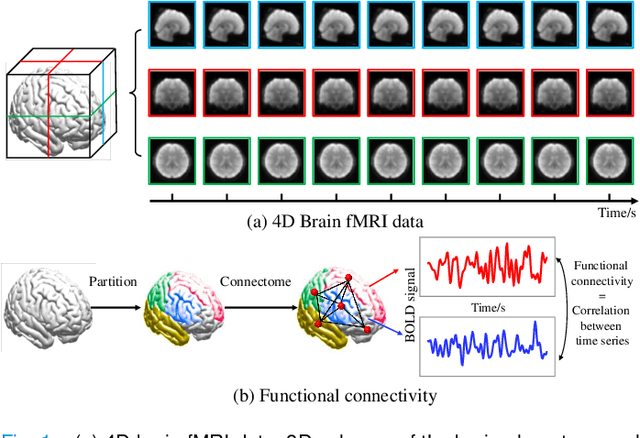
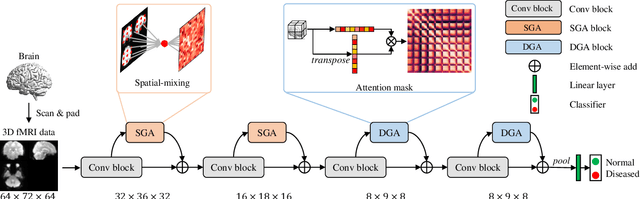
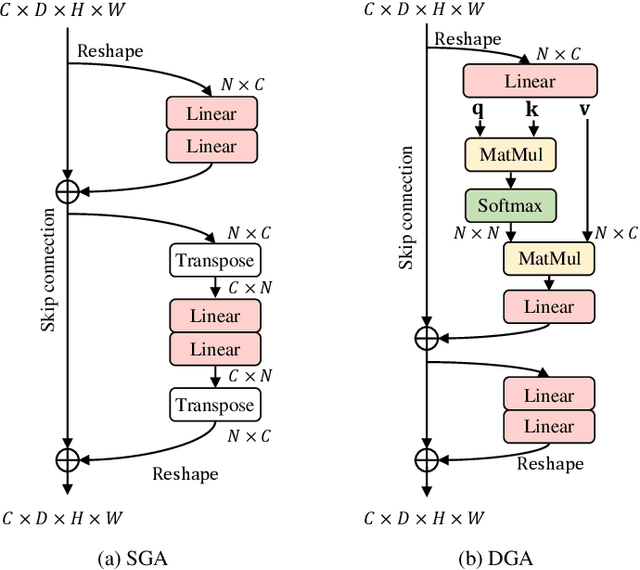
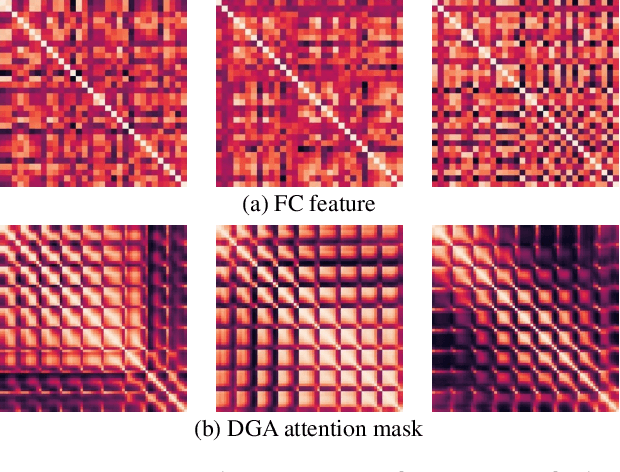
In neuroimaging analysis, functional magnetic resonance imaging (fMRI) can well assess brain function changes for brain diseases with no obvious structural lesions. So far, most deep-learning-based fMRI studies take functional connectivity as the basic feature in disease classification. However, functional connectivity is often calculated based on time series of predefined regions of interest and neglects detailed information contained in each voxel, which may accordingly deteriorate the performance of diagnostic models. Another methodological drawback is the limited sample size for the training of deep models. In this study, we propose BrainFormer, a general hybrid Transformer architecture for brain disease classification with single fMRI volume to fully exploit the voxel-wise details with sufficient data dimensions and sizes. BrainFormer is constructed by modeling the local cues within each voxel with 3D convolutions and capturing the global relations among distant regions with two global attention blocks. The local and global cues are aggregated in BrainFormer by a single-stream model. To handle multisite data, we propose a normalization layer to normalize the data into identical distribution. Finally, a Gradient-based Localization-map Visualization method is utilized for locating the possible disease-related biomarker. We evaluate BrainFormer on five independently acquired datasets including ABIDE, ADNI, MPILMBB, ADHD-200 and ECHO, with diseases of autism, Alzheimer's disease, depression, attention deficit hyperactivity disorder, and headache disorders. The results demonstrate the effectiveness and generalizability of BrainFormer for multiple brain diseases diagnosis. BrainFormer may promote neuroimaging-based precision diagnosis in clinical practice and motivate future study in fMRI analysis. Code is available at: https://github.com/ZiyaoZhangforPCL/BrainFormer.