 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePASM: Population Adaptive Symbolic Mixture-of-Experts Model for Cross-location Hurricane Evacuation Decision Prediction
Mar 31, 2026Accurate prediction of evacuation behavior is critical for disaster preparedness, yet models trained in one region often fail elsewhere. Using a multi-state hurricane evacuation survey, we show this failure goes beyond feature distribution shift: households with similar characteristics follow systematically different decision patterns across states. As a result, single global models overfit dominant responses, misrepresent vulnerable subpopulations, and generalize poorly across locations. We propose Population-Adaptive Symbolic Mixture-of-Experts (PASM), which pairs large language model guided symbolic regression with a mixture-of-experts architecture. PASM discovers human-readable closed-form decision rules, specializes them to data-driven subpopulations, and routes each input to the appropriate expert at inference time. On Hurricanes Harvey and Irma data, transferring from Florida and Texas to Georgia with 100 calibration samples, PASM achieves a Matthews correlation coefficient of 0.607, compared to XGBoost (0.404), TabPFN (0.333), GPT-5-mini (0.434), and meta-learning baselines MAML and Prototypical Networks (MCC $\leq$ 0.346). The routing mechanism assigns distinct formula archetypes to subpopulations, so the resulting behavioral profiles are directly interpretable. A fairness audit across four demographic axes finds no statistically significant disparities after Bonferroni correction. PASM closes more than half the cross-location generalization gap while keeping decision rules transparent enough for real-world emergency planning.
A Deep Generative Framework for Joint Households and Individuals Population Synthesis
Jun 30, 2024Household and individual-level sociodemographic data are essential for understanding human-infrastructure interaction and policymaking. However, the Public Use Microdata Sample (PUMS) offers only a sample at the state level, while census tract data only provides the marginal distributions of variables without correlations. Therefore, we need an accurate synthetic population dataset that maintains consistent variable correlations observed in microdata, preserves household-individual and individual-individual relationships, adheres to state-level statistics, and accurately represents the geographic distribution of the population. We propose a deep generative framework leveraging the variational autoencoder (VAE) to generate a synthetic population with the aforementioned features. The methodological contributions include (1) a new data structure for capturing household-individual and individual-individual relationships, (2) a transfer learning process with pre-training and fine-tuning steps to generate households and individuals whose aggregated distributions align with the census tract marginal distribution, and (3) decoupled binary cross-entropy (D-BCE) loss function enabling distribution shift and out-of-sample records generation. Model results for an application in Delaware, USA demonstrate the ability to ensure the realism of generated household-individual records and accurately describe population statistics at the census tract level compared to existing methods. Furthermore, testing in North Carolina, USA yielded promising results, supporting the transferability of our method.
Network-wide traffic signal control optimization using a multi-agent deep reinforcement learning
Apr 20, 2021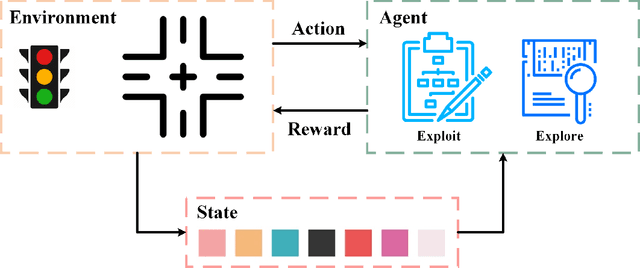
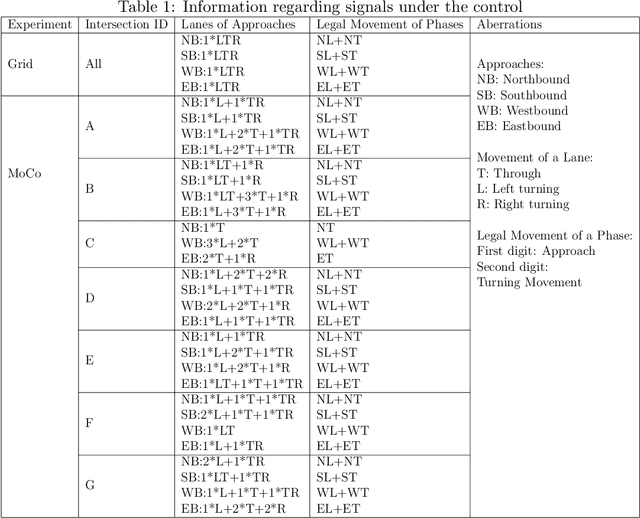
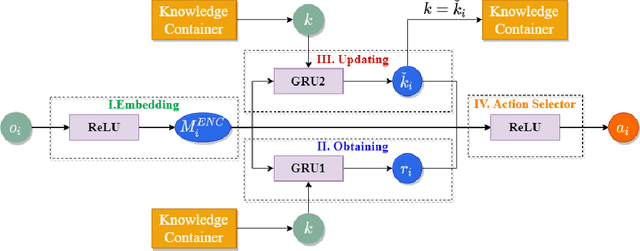
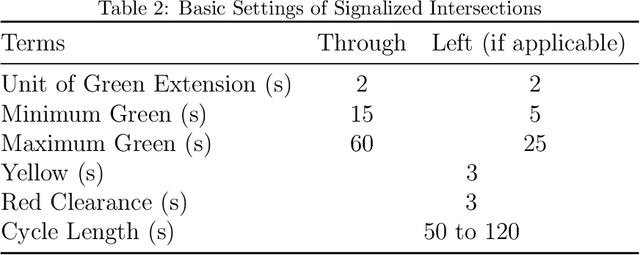
Inefficient traffic control may cause numerous problems such as traffic congestion and energy waste. This paper proposes a novel multi-agent reinforcement learning method, named KS-DDPG (Knowledge Sharing Deep Deterministic Policy Gradient) to achieve optimal control by enhancing the cooperation between traffic signals. By introducing the knowledge-sharing enabled communication protocol, each agent can access to the collective representation of the traffic environment collected by all agents. The proposed method is evaluated through two experiments respectively using synthetic and real-world datasets. The comparison with state-of-the-art reinforcement learning-based and conventional transportation methods demonstrate the proposed KS-DDPG has significant efficiency in controlling large-scale transportation networks and coping with fluctuations in traffic flow. In addition, the introduced communication mechanism has also been proven to speed up the convergence of the model without significantly increasing the computational burden.
A Hybrid Deep Learning Model for Predictive Flood Warning and Situation Awareness using Channel Network Sensors Data
Jun 15, 2020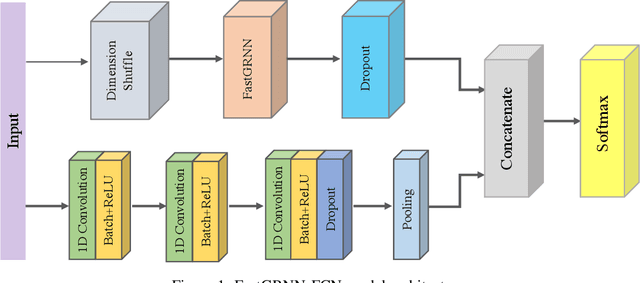
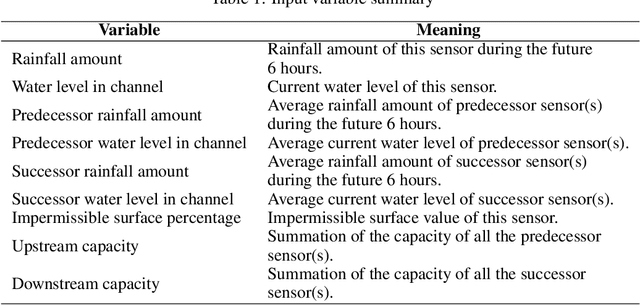
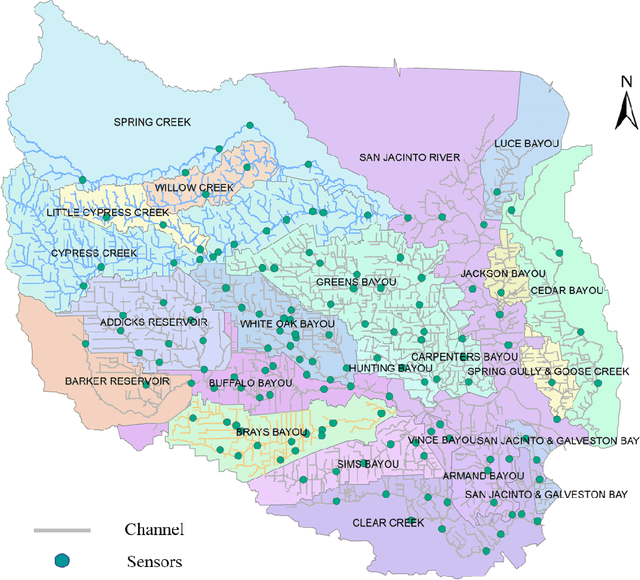
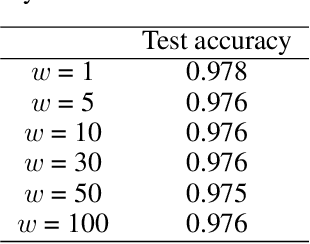
The objective of this study is to create and test a hybrid deep learning model, FastGRNN-FCN (Fast, Accurate, Stable and Tiny Gated Recurrent Neural Network-Fully Convolutional Neural Network), for urban flood prediction and situation awareness using channel network sensors data. The study used Harris County, Texas as the testbed, and obtained channel sensor data from three historical flood events (e.g., 2016 Tax Day Flood, 2016 Memorial Day flood, and 2017 Hurricane Harvey Flood) for training and validating the hybrid deep learning model. The flood data are divided into a multivariate time series and used as the model input. Each input comprises nine variables, including information of the studied channel sensor and its predecessor and successor sensors in the channel network. Precision-recall curve and F-measure are used to identify the optimal set of model parameters. The optimal model with a weight of 1 and a critical threshold of 0.63 are obtained through one hundred iterations based on examining different weights and thresholds. The test accuracy and F-measure eventually reach 97.8% and 0.8, respectively. The model is then tested in predicting the 2019 Imelda flood in Houston and the results show an excellent match with the empirical flood. The results show that the model enables accurate prediction of the spatial-temporal flood propagation and recession and provides emergency response officials with a situation awareness and predictive flood warning tool for prioritizing the flood response and resource allocation strategies.