 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmission-Aware Reinforcement Learning for Sustainable Electric Vehicle Charging and Carbon Dioxide Reduction Under Varying Renewable Penetration
May 23, 2026The rapid growth of Electric Vehicle (EV) adoption challenges power distribution networks through peak load spikes, voltage instability, and transformer overloads from uncoordinated charging. While Model Predictive Control (MPC) and standard Reinforcement Learning (RL) methods have addressed these issues, existing approaches rarely treat real-time carbon intensity or fluctuating renewable energy (RE) availability as primary scheduling objectives, leaving substantial decarbonisation potential unrealised. This paper proposes an emission-aware RL strategy based on the Soft Actor Critic (SAC) algorithm, with a multi-objective reward that penalises carbon emissions, curtailed on-site renewables, and unmet user demand. The agent is trained within a unified benchmarking framework on the EV2Gym platform, incorporating behind-the-meter solar and wind profiles, time-varying EirGrid carbon intensity data, and realistic workplace EV behaviour across 25 Electric Vehicle Supply Equipment (EVSE) units. Nine control strategies, including heuristics, emission-aware MPC variants, and the proposed RL agent, are compared under five renewable penetration scenarios (0%-50%) over ten independent runs each. The RL agent achieves a carbon intensity as low as 23.96 grams of carbon dioxide per kilowatt-hour under 50% wind penetration, representing up to 87% emission reduction versus the uncontrolled baseline, and outperforms the external graph-based Power Distribution Network (PDN) benchmark. Transformer overload remains below 7 kWh across scenarios, against up to 1093 kWh for the As Fast As Possible (AFAP) heuristic, and renewable self-consumption reaches 52% under combined wind and solar supply. Embedding carbon intensity forecasts into the RL state and reward aligns charging with low-emission periods while preserving grid compliance and user satisfaction.
Rethinking gradient weights' influence over saliency map estimation
Jul 12, 2022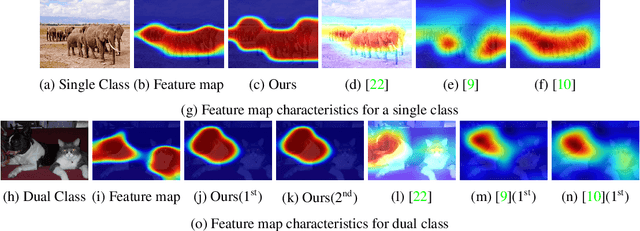

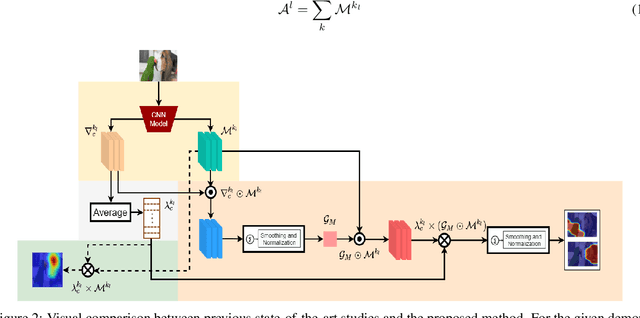

Class activation map (CAM) helps to formulate saliency maps that aid in interpreting the deep neural network's prediction. Gradient-based methods are generally faster than other branches of vision interpretability and independent of human guidance. The performance of CAM-like studies depends on the governing model's layer response, and the influences of the gradients. Typical gradient-oriented CAM studies rely on weighted aggregation for saliency map estimation by projecting the gradient maps into single weight values, which may lead to over generalized saliency map. To address this issue, we use a global guidance map to rectify the weighted aggregation operation during saliency estimation, where resultant interpretations are comparatively clean er and instance-specific. We obtain the global guidance map by performing elementwise multiplication between the feature maps and their corresponding gradient maps. To validate our study, we compare the proposed study with eight different saliency visualizers. In addition, we use seven commonly used evaluation metrics for quantitative comparison. The proposed scheme achieves significant improvement over the test images from the ImageNet, MS-COCO 14, and PASCAL VOC 2012 datasets.
Denoising single images by feature ensemble revisited
Jul 11, 2022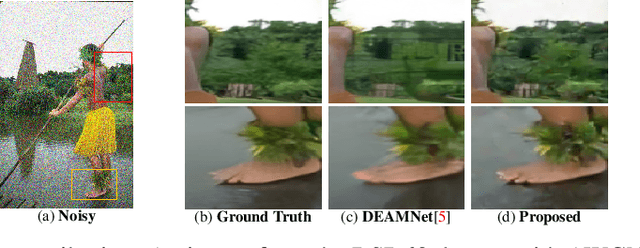
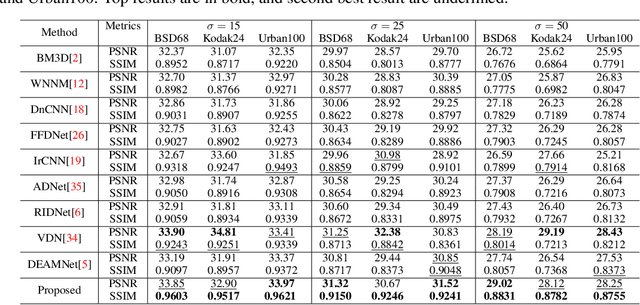
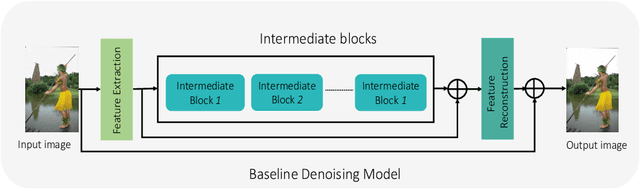

Image denoising is still a challenging issue in many computer vision sub-domains. Recent studies show that significant improvements are made possible in a supervised setting. However, few challenges, such as spatial fidelity and cartoon-like smoothing remain unresolved or decisively overlooked. Our study proposes a simple yet efficient architecture for the denoising problem that addresses the aforementioned issues. The proposed architecture revisits the concept of modular concatenation instead of long and deeper cascaded connections, to recover a cleaner approximation of the given image. We find that different modules can capture versatile representations, and concatenated representation creates a richer subspace for low-level image restoration. The proposed architecture's number of parameters remains smaller than the number for most of the previous networks and still achieves significant improvements over the current state-of-the-art networks.