 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFIRE: Frobenius-Isometry Reinitialization for Balancing the Stability-Plasticity Tradeoff
Feb 08, 2026Deep neural networks trained on nonstationary data must balance stability (i.e., retaining prior knowledge) and plasticity (i.e., adapting to new tasks). Standard reinitialization methods, which reinitialize weights toward their original values, are widely used but difficult to tune: conservative reinitializations fail to restore plasticity, while aggressive ones erase useful knowledge. We propose FIRE, a principled reinitialization method that explicitly balances the stability-plasticity tradeoff. FIRE quantifies stability through Squared Frobenius Error (SFE), measuring proximity to past weights, and plasticity through Deviation from Isometry (DfI), reflecting weight isotropy. The reinitialization point is obtained by solving a constrained optimization problem, minimizing SFE subject to DfI being zero, which is efficiently approximated by Newton-Schulz iteration. FIRE is evaluated on continual visual learning (CIFAR-10 with ResNet-18), language modeling (OpenWebText with GPT-0.1B), and reinforcement learning (HumanoidBench with SAC and Atari games with DQN). Across all domains, FIRE consistently outperforms both naive training without intervention and standard reinitialization methods, demonstrating effective balancing of the stability-plasticity tradeoff.
Prism: Spectral Parameter Sharing for Multi-Agent Reinforcement Learning
Feb 06, 2026Parameter sharing is a key strategy in multi-agent reinforcement learning (MARL) for improving scalability, yet conventional fully shared architectures often collapse into homogeneous behaviors. Recent methods introduce diversity through clustering, pruning, or masking, but typically compromise resource efficiency. We propose Prism, a parameter sharing framework that induces inter-agent diversity by representing shared networks in the spectral domain via singular value decomposition (SVD). All agents share the singular vector directions while learning distinct spectral masks on singular values. This mechanism encourages inter-agent diversity and preserves scalability. Extensive experiments on both homogeneous (LBF, SMACv2) and heterogeneous (MaMuJoCo) benchmarks show that Prism achieves competitive performance with superior resource efficiency.
Activation by Interval-wise Dropout: A Simple Way to Prevent Neural Networks from Plasticity Loss
Feb 03, 2025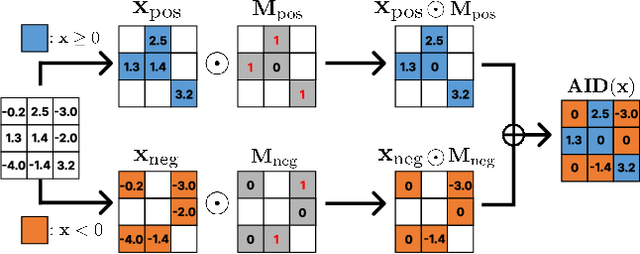



Plasticity loss, a critical challenge in neural network training, limits a model's ability to adapt to new tasks or shifts in data distribution. This paper introduces AID (Activation by Interval-wise Dropout), a novel method inspired by Dropout, designed to address plasticity loss. Unlike Dropout, AID generates subnetworks by applying Dropout with different probabilities on each preactivation interval. Theoretical analysis reveals that AID regularizes the network, promoting behavior analogous to that of deep linear networks, which do not suffer from plasticity loss. We validate the effectiveness of AID in maintaining plasticity across various benchmarks, including continual learning tasks on standard image classification datasets such as CIFAR10, CIFAR100, and TinyImageNet. Furthermore, we show that AID enhances reinforcement learning performance in the Arcade Learning Environment benchmark.
RaidEnv: Exploring New Challenges in Automated Content Balancing for Boss Raid Games
Jul 04, 2023The balance of game content significantly impacts the gaming experience. Unbalanced game content diminishes engagement or increases frustration because of repetitive failure. Although game designers intend to adjust the difficulty of game content, this is a repetitive, labor-intensive, and challenging process, especially for commercial-level games with extensive content. To address this issue, the game research community has explored automated game balancing using artificial intelligence (AI) techniques. However, previous studies have focused on limited game content and did not consider the importance of the generalization ability of playtesting agents when encountering content changes. In this study, we propose RaidEnv, a new game simulator that includes diverse and customizable content for the boss raid scenario in MMORPG games. Additionally, we design two benchmarks for the boss raid scenario that can aid in the practical application of game AI. These benchmarks address two open problems in automatic content balancing, and we introduce two evaluation metrics to provide guidance for AI in automatic content balancing. This novel game research platform expands the frontiers of automatic game balancing problems and offers a framework within a realistic game production pipeline.
Resilience of Autonomous Vehicle Object Category Detection to Universal Adversarial Perturbations
Jul 10, 2021
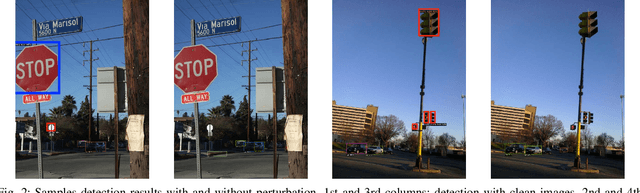
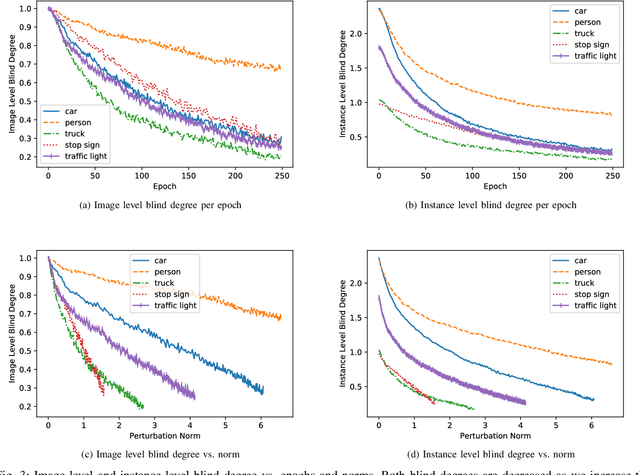
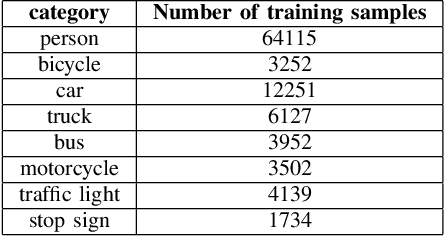
Due to the vulnerability of deep neural networks to adversarial examples, numerous works on adversarial attacks and defenses have been burgeoning over the past several years. However, there seem to be some conventional views regarding adversarial attacks and object detection approaches that most researchers take for granted. In this work, we bring a fresh perspective on those procedures by evaluating the impact of universal perturbations on object detection at a class-level. We apply it to a carefully curated data set related to autonomous driving. We use Faster-RCNN object detector on images of five different categories: person, car, truck, stop sign and traffic light from the COCO data set, while carefully perturbing the images using Universal Dense Object Suppression algorithm. Our results indicate that person, car, traffic light, truck and stop sign are resilient in that order (most to least) to universal perturbations. To the best of our knowledge, this is the first time such a ranking has been established which is significant for the security of the data sets pertaining to autonomous vehicles and object detection in general.