 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadrature Oscillation System for Coordinated Motion in Crawling Origami Robot
Mar 24, 2026Origami-inspired robots offer rapid, accessible design and manufacture with diverse functionalities. In particular, origami robots without conventional electronics have the unique advantage of functioning in extreme environments such as ones with high radiation or large magnetic fields. However, the absence of sophisticated control systems limits these robots to simple autonomous behaviors. In our previous studies, we developed a printable, electronics-free, and self-sustained oscillator that generates simple complementary square-wave signals. Our study presents a quadrature oscillation system capable of generating four square-wave signals a quarter-cycle out of phase, enabling four distinct states. Such control signals are important in various engineering and robotics applications, such as orchestrating limb movements in bio-inspired robots. We demonstrate the practicality and value of this oscillation system by designing and constructing an origami crawling robot that utilizes the quadrature oscillator to achieve coordinated locomotion. Together, the oscillator and robot illustrate the potential for more complex control and functions in origami robotics, paving the way for more electronics-free, rapid-design origami robots with advanced autonomous behaviors.
LaneAF: Robust Multi-Lane Detection with Affinity Fields
Apr 02, 2021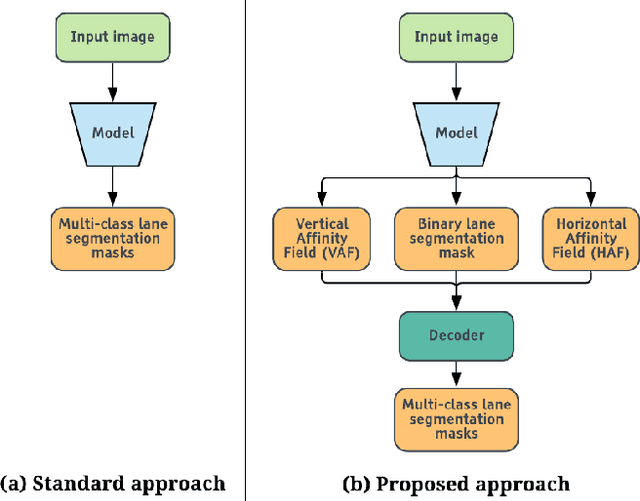
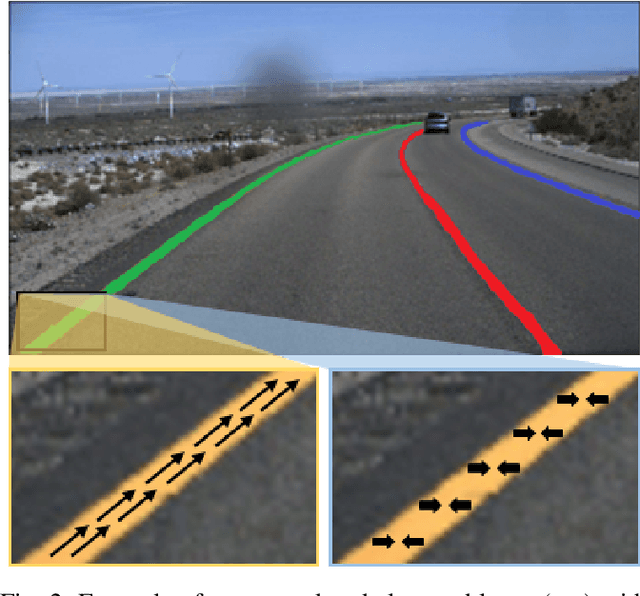
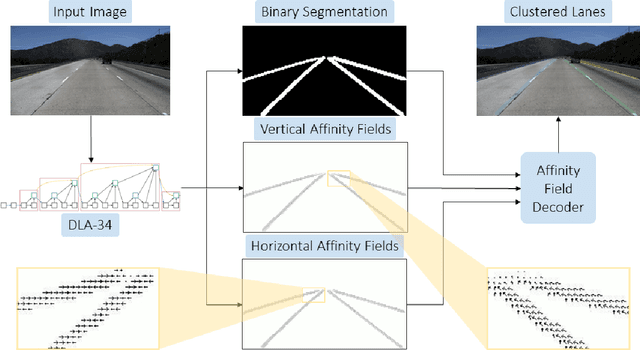
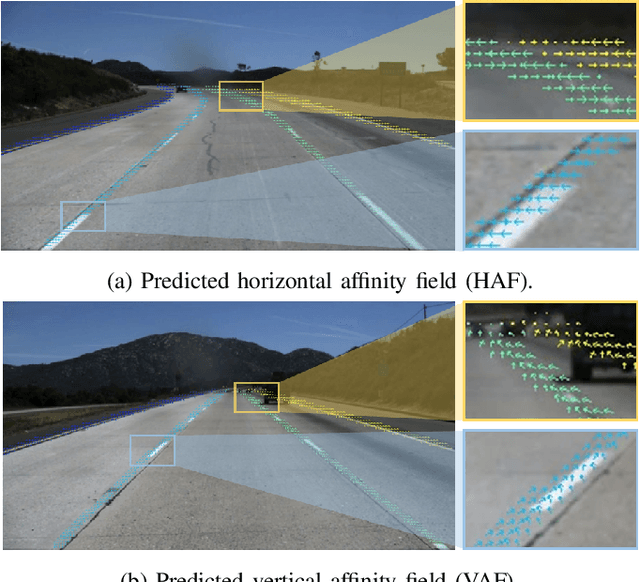
This study presents an approach to lane detection involving the prediction of binary segmentation masks and per-pixel affinity fields. These affinity fields, along with the binary masks, can then be used to cluster lane pixels horizontally and vertically into corresponding lane instances in a post-processing step. This clustering is achieved through a simple row-by-row decoding process with little overhead; such an approach allows LaneAF to detect a variable number of lanes without assuming a fixed or maximum number of lanes. Moreover, this form of clustering is more interpretable in comparison to previous visual clustering approaches, and can be analyzed to identify and correct sources of error. Qualitative and quantitative results obtained on popular lane detection datasets demonstrate the model's ability to detect and cluster lanes effectively and robustly. Our proposed approach performs on par with state-of-the-art approaches on the limited TuSimple benchmark, and sets a new state-of-the-art on the challenging CULane dataset.