 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAERMANI-PLACE: Language Guided Object Placement with Aerial Manipulators
Jun 12, 2026Object placement is a fundamental component of aerial manipulation tasks, yet existing systems typically require the desired placement position to be specified explicitly in metric coordinates. Such interfaces are not intuitive and require users to reason about coordinate frames and scene geometry, making them difficult to use in practical deployments. In contrast, humans often communicate spatial goals through a combination of language and pointing gestures. Inspired by this observation, we present AERMANI-PLACE, a framework for language-guided object placement with aerial manipulators. Given a scene image and a natural language instruction, an image editing model generates a modified version of the scene containing a visual marker that indicates where the object should be placed. This marker is then grounded into the physical environment using depth observations to recover a metric place point, after which a placement trajectory is generated and executed by the aerial manipulator. We evaluate the proposed approach on a test set of 100 language-guided placement tasks and demonstrate successful execution on a real aerial manipulation platform. Experimental results show that the proposed method reliably infers placement locations from language instructions with an average success rate of 87\% on the test-set and transfers effectively to real-world aerial manipulation with an average success rate of 72\%. Video: https://youtu.be/SgwwgLBsv0g
Adaptive Artificial Time-Delay Control with Barrier Lyapunov Constraints for Euler-Lagrange Robots
May 29, 2026This paper addresses the challenge of simultaneously compensating for state-dependent uncertainties and enforcing time-varying state constraints in Euler-Lagrange systems, a common requirement in robotics that remains underserved by existing control designs. A novel adaptive control framework is developed that combines an artificial time-delay-based uncertainty estimation strategy, also known as time-delay estimation, with a barrier Lyapunov function to enforce constraint-aware control design. Specifically, a state-dependent upper bound on the time-delay estimation approximation error is analytically formulated, and an adaptive law is constructed to estimate its parameters online, enabling real-time state-dependent uncertainty compensation without relying on prior model knowledge. To ensure constraint compliance, the barrier Lyapunov function-based controller enforces time-varying bounds on both position and velocity. The resulting architecture is provably stable via Lyapunov analysis. Experimental results on a five-degree-of-freedom robotic manipulator validate the framework's capability, compared with the state of the art, in maintaining strict adherence to safety-critical constraints under dynamic uncertainties.
AeroGrab: A Unified Framework for Aerial Grasping in Cluttered Environments
Mar 16, 2026Reliable aerial grasping in cluttered environments remains challenging due to occlusions and collision risks. Existing aerial manipulation pipelines largely rely on centroid-based grasping and lack integration between the grasp pose generation models, active exploration, and language-level task specification, resulting in the absence of a complete end-to-end system. In this work, we present an integrated pipeline for reliable aerial grasping in cluttered environments. Given a scene and a language instruction, the system identifies the target object and actively explores it to gain better views of the object. During exploration, a grasp generation network predicts multiple 6-DoF grasp candidates for each view. Each candidate is evaluated using a collision-aware feasibility framework, and the overall best grasp is selected and executed using standard trajectory generation and control methods. Experiments in cluttered real-world scenarios demonstrate robust and reliable grasp execution, highlighting the effectiveness of combining active perception with feasibility-aware grasp selection for aerial manipulation.
AeroPlace-Flow: Language-Grounded Object Placement for Aerial Manipulators via Visual Foresight and Object Flow
Mar 08, 2026Precise object placement remains underexplored in aerial manipulation, where most systems rely on predefined target coordinates and focus primarily on grasping and control. Specifying exact placement poses, however, is cumbersome in real-world settings, where users naturally communicate goals through language. In this work, we present AeroPlace-Flow, a training-free framework for language-grounded aerial object placement that unifies visual foresight with explicit 3D geometric reasoning and object flow. Given RGB-D observations of the object and the placement scene, along with a natural language instruction, AeroPlace-Flow first synthesizes a task-complete goal image using image editing models. The imagined configuration is then grounded into metric 3D space through depth alignment and object-centric reasoning, enabling the inference of a collision-aware object flow that transports the grasped object to a language and contact-consistent placement configuration. The resulting motion is executed via standard trajectory tracking for an aerial manipulator. AeroPlace-Flow produces executable placement targets without requiring predefined poses or task-specific training. We validate our approach through extensive simulation and real-world experiments, demonstrating reliable language-conditioned placement across diverse aerial scenarios with an average success rate of 75% on hardware.
Bab_Sak Robotic Intubation System (BRIS): A Learning-Enabled Control Framework for Safe Fiberoptic Endotracheal Intubation
Dec 26, 2025Endotracheal intubation is a critical yet technically demanding procedure, with failure or improper tube placement leading to severe complications. Existing robotic and teleoperated intubation systems primarily focus on airway navigation and do not provide integrated control of endotracheal tube advancement or objective verification of tube depth relative to the carina. This paper presents the Robotic Intubation System (BRIS), a compact, human-in-the-loop platform designed to assist fiberoptic-guided intubation while enabling real-time, objective depth awareness. BRIS integrates a four-way steerable fiberoptic bronchoscope, an independent endotracheal tube advancement mechanism, and a camera-augmented mouthpiece compatible with standard clinical workflows. A learning-enabled closed-loop control framework leverages real-time shape sensing to map joystick inputs to distal bronchoscope tip motion in Cartesian space, providing stable and intuitive teleoperation under tendon nonlinearities and airway contact. Monocular endoscopic depth estimation is used to classify airway regions and provide interpretable, anatomy-aware guidance for safe tube positioning relative to the carina. The system is validated on high-fidelity airway mannequins under standard and difficult airway configurations, demonstrating reliable navigation and controlled tube placement. These results highlight BRIS as a step toward safer, more consistent, and clinically compatible robotic airway management.
SVC-onGoing: Signature Verification Competition
Aug 13, 2021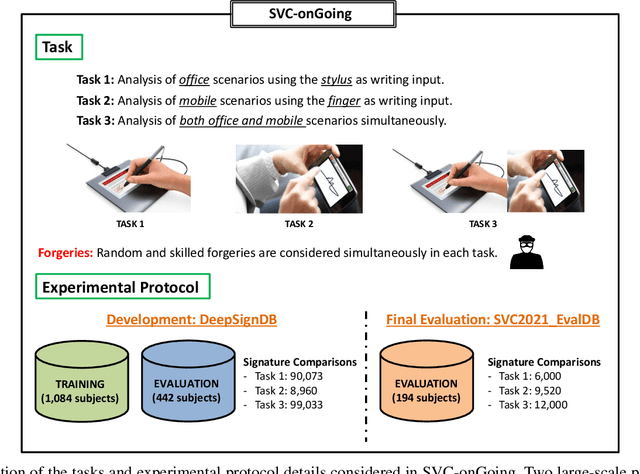
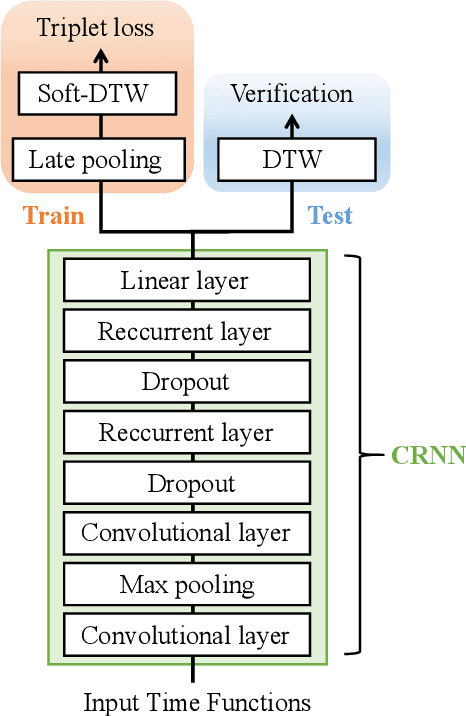
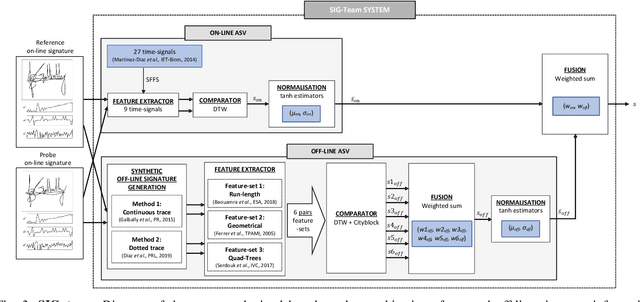
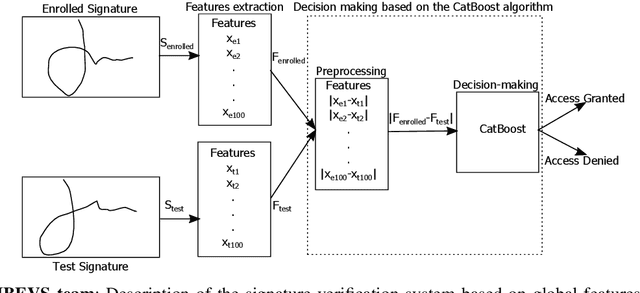
This article presents SVC-onGoing, an on-going competition for on-line signature verification where researchers can easily benchmark their systems against the state of the art in an open common platform using large-scale public databases, such as DeepSignDB and SVC2021_EvalDB, and standard experimental protocols. SVC-onGoing is based on the ICDAR 2021 Competition on On-Line Signature Verification (SVC 2021), which has been extended to allow participants anytime. The goal of SVC-onGoing is to evaluate the limits of on-line signature verification systems on popular scenarios (office/mobile) and writing inputs (stylus/finger) through large-scale public databases. Three different tasks are considered in the competition, simulating realistic scenarios as both random and skilled forgeries are simultaneously considered on each task. The results obtained in SVC-onGoing prove the high potential of deep learning methods in comparison with traditional methods. In particular, the best signature verification system has obtained Equal Error Rate (EER) values of 3.33% (Task 1), 7.41% (Task 2), and 6.04% (Task 3). Future studies in the field should be oriented to improve the performance of signature verification systems on the challenging mobile scenarios of SVC-onGoing in which several mobile devices and the finger are used during the signature acquisition.
ICDAR 2021 Competition on On-Line Signature Verification
Jun 01, 2021
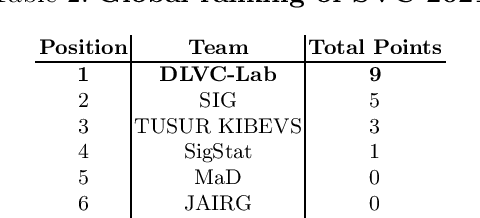
This paper describes the experimental framework and results of the ICDAR 2021 Competition on On-Line Signature Verification (SVC 2021). The goal of SVC 2021 is to evaluate the limits of on-line signature verification systems on popular scenarios (office/mobile) and writing inputs (stylus/finger) through large-scale public databases. Three different tasks are considered in the competition, simulating realistic scenarios as both random and skilled forgeries are simultaneously considered on each task. The results obtained in SVC 2021 prove the high potential of deep learning methods. In particular, the best on-line signature verification system of SVC 2021 obtained Equal Error Rate (EER) values of 3.33% (Task 1), 7.41% (Task 2), and 6.04% (Task 3). SVC 2021 will be established as an on-going competition, where researchers can easily benchmark their systems against the state of the art in an open common platform using large-scale public databases such as DeepSignDB and SVC2021_EvalDB, and standard experimental protocols.