 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing the Whole-life Cost in End-to-end CNN Acceleration
Apr 12, 2021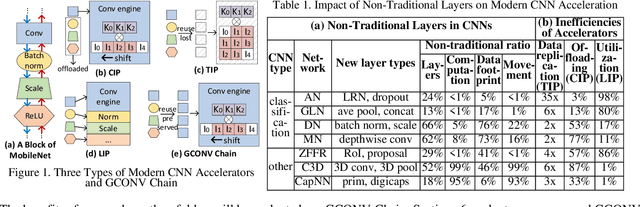
The acceleration of CNNs has gained increasing atten-tion since their success in computer vision. With the heterogeneous functional layers that cannot be pro-cessed by the accelerators proposed for convolution layers only, modern end-to-end CNN acceleration so-lutions either transform the diverse computation into matrix/vector arithmetic, which loses data reuse op-portunities in convolution, or introduce dedicated functional unit to each kind of layer, which results in underutilization and high update expense. To enhance the whole-life cost efficiency, we need an acceleration solution that is efficient in processing CNN layers and has the generality to apply to all kinds of existing and emerging layers. To this end, we pro-pose GCONV Chain, a method to convert the entire CNN computation into a chain of standard general convolutions (GCONV) that can be efficiently pro-cessed by the existing CNN accelerators. This paper comprehensively analyzes the GCONV Chain model and proposes a full-stack implementation to support GCONV Chain. On one hand, the results on seven var-ious CNNs demonstrate that GCONV Chain improves the performance and energy efficiency of existing CNN accelerators by an average of 3.4x and 3.2x re-spectively. On the other hand, we show that GCONV Chain provides low whole-life costs for CNN accelera-tion, including both developer efforts and total cost of ownership for the users.
Resilient Cooperative Adaptive Cruise Control for Autonomous Vehicles Using Machine Learning
Mar 18, 2021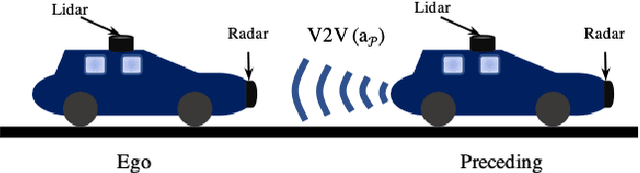
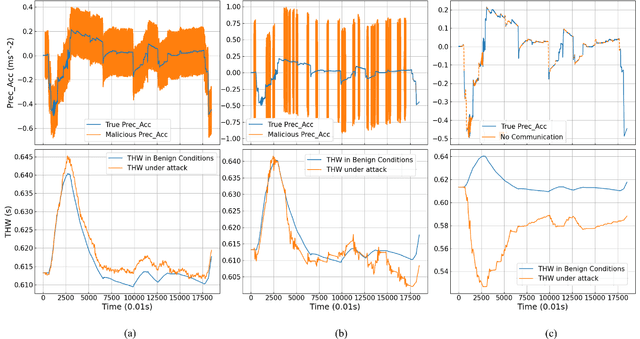
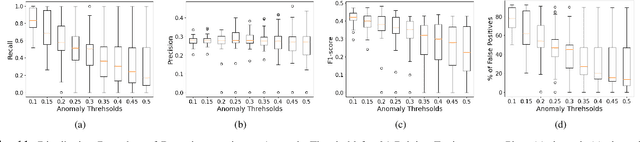
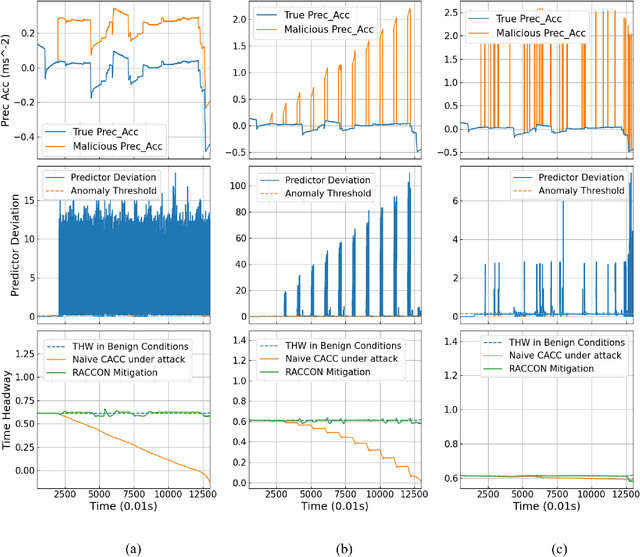
Cooperative Adaptive Cruise Control (CACC) is a fundamental connected vehicle application that extends Adaptive Cruise Control by exploiting vehicle-to-vehicle (V2V) communication. CACC is a crucial ingredient for numerous autonomous vehicle functionalities including platooning, distributed route management, etc. Unfortunately, malicious V2V communications can subvert CACC, leading to string instability and road accidents. In this paper, we develop a novel resiliency infrastructure, RACCON, for detecting and mitigating V2V attacks on CACC. RACCON uses machine learning to develop an on-board prediction model that captures anomalous vehicular responses and performs mitigation in real time. RACCON-enabled vehicles can exploit the high efficiency of CACC without compromising safety, even under potentially adversarial scenarios. We present extensive experimental evaluation to demonstrate the efficacy of RACCON.