 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient-Controlled Decoding: A Safety Guardrail for LLMs with Dual-Anchor Steering
Apr 06, 2026Large language models (LLMs) remain susceptible to jailbreak and direct prompt-injection attacks, yet the strongest defensive filters frequently over-refuse benign queries and degrade user experience. Previous work on jailbreak and prompt injection detection such as GradSafe, detects unsafe prompts with a single "accept all" anchor token, but its threshold is brittle and it offers no deterministic guarantee that harmful content will not be emitted once decoding begins. We introduce Gradient-Controlled Decoding (GCD), a training-free guardrail that combines an acceptance anchor token ("Sure") and refusal anchor token ("Sorry") tightening the decision boundary and significantly lowering false positives. In the mitigation stage, if a prompt is flagged, GCD preset-injects one or two refusal tokens ("Sorry, I can't...") before autoregressive decoding resumes, guaranteeing first-token safety regardless of sampling strategy. On ToxicChat, XSTest-v2, and AdvBench, GCD reduces false positives by 52% vs. GradSafe at comparable recall, lowers attack success rate by up to 10% vs. the strongest decoding-only baseline, adds under 15-20 ms latency on an average on V100 instances, transfers to LLaMA-2-7B, Mixtral-8x7B, and Qwen-2-7B, and requires only 20 demonstration templates.
VLASE: Vehicle Localization by Aggregating Semantic Edges
Jul 06, 2018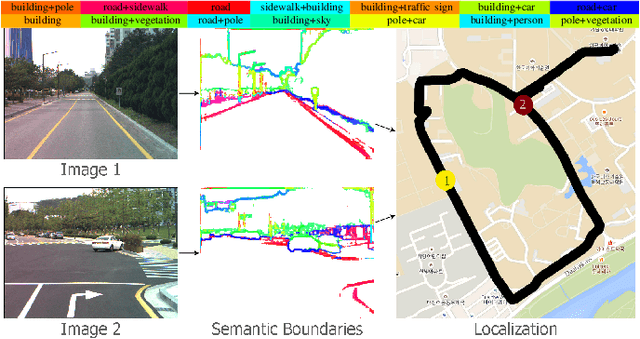
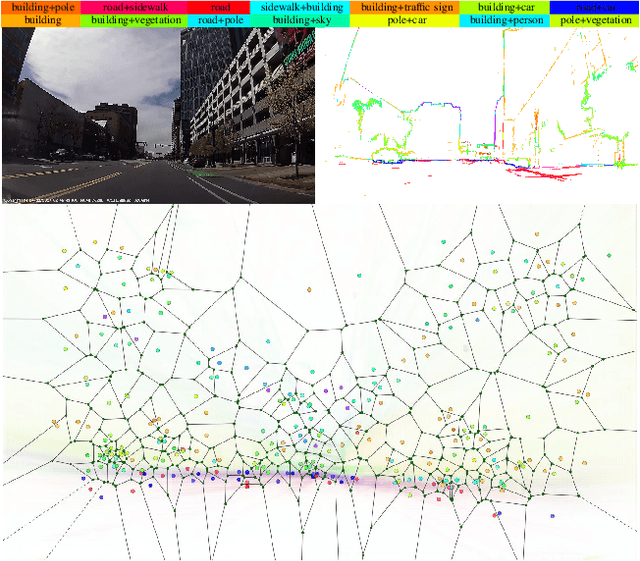
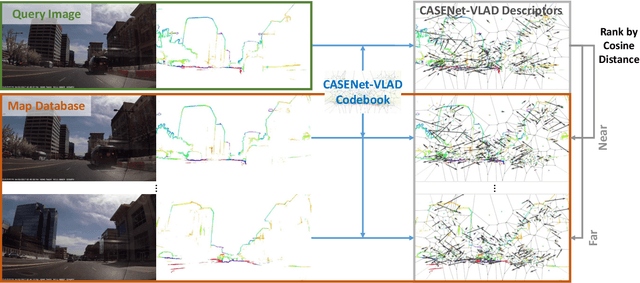
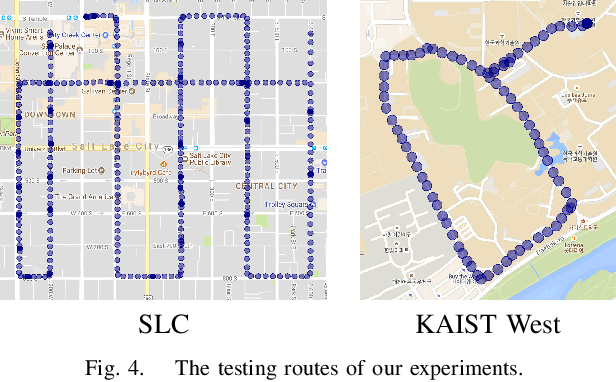
In this paper, we propose VLASE, a framework to use semantic edge features from images to achieve on-road localization. Semantic edge features denote edge contours that separate pairs of distinct objects such as building-sky, road- sidewalk, and building-ground. While prior work has shown promising results by utilizing the boundary between prominent classes such as sky and building using skylines, we generalize this approach to consider semantic edge features that arise from 19 different classes. Our localization algorithm is simple, yet very powerful. We extract semantic edge features using a recently introduced CASENet architecture and utilize VLAD framework to perform image retrieval. Our experiments show that we achieve improvement over some of the state-of-the-art localization algorithms such as SIFT-VLAD and its deep variant NetVLAD. We use ablation study to study the importance of different semantic classes and show that our unified approach achieves better performance compared to individual prominent features such as skylines.