 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Real-Time Autonomous Navigation: Transformer-Based Catheter Tip Tracking in Fluoroscopy
May 14, 2026Purpose: Mechanical thrombectomy (MT) improves stroke outcomes, but is limited by a lack of local treatment access. Widespread distribution of reinforcement learning (RL)-based robotic systems can be used to alleviate this challenge through autonomous navigation, but current RL methods require live device tip coordinate tracking to function. This paper aims to develop and evaluate a real-time catheter tip tracking pipeline under fluoroscopy, addressing challenges such as low contrast, noise, and device occlusion. Methods: A multi-threaded pipeline was designed, incorporating frame reading, preprocessing, inference, and post-processing. Deep learning segmentation models, including U-Net, U-Net+Transformer, and SegFormer, were trained and benchmarked using two-class and three-class formulations. Post-processing involved two-step component filtering, one-pixel medial skeletonization, and greedy arc-length path following with contour fall-back. Results: On manually-labeled moderate complexity fluoroscopic video data, the two-class SegFormer achieved a mean absolute error of 4.44 mm, outperforming U-Net (4.60 mm), U-Net+Transformer (6.20 mm) and all three-class models (5.19-7.74 mm). On segmentation benchmarks, the system exceeded state-of-the-art CathAction results with improvements of up to +5% in Dice scores for three-segmentation. Conclusion: The results demonstrate that the proposed multi-threaded tracking framework maintains stable performance under challenging imaging conditions, outperforming prior benchmarks, while providing a reliable and efficient foundation for RL-based autonomous MT navigation.
* Harry Robertshaw and Yanghe Hao contributed equally to this work. Published in the International Journal of Computer Assisted Radiology and Surgery
A Position Statement on Endovascular Models and Effectiveness Metrics for Mechanical Thrombectomy Navigation, on behalf of the Stakeholder Taskforce for AI-assisted Robotic Thrombectomy (START)
Mar 30, 2026While we are making progress in overcoming infectious diseases and cancer; one of the major medical challenges of the mid-21st century will be the rising prevalence of stroke. Large vessels occlusions are especially debilitating, yet effective treatment (needed within hours to achieve best outcomes) remains limited due to geography. One solution for improving timely access to mechanical thrombectomy in geographically diverse populations is the deployment of robotic surgical systems. Artificial intelligence (AI) assistance may enable the upskilling of operators in this emerging therapeutic delivery approach. Our aim was to establish consensus frameworks for developing and validating AI-assisted robots for thrombectomy. Objectives included standardizing effectiveness metrics and defining reference testbeds across in silico, in vitro, ex vivo, and in vivo environments. To achieve this, we convened experts in neurointervention, robotics, data science, health economics, policy, statistics, and patient advocacy. Consensus was built through an incubator day, a Delphi process, and a final Position Statement. We identified that the four essential testbed environments each had distinct validation roles. Realism requirements vary: simpler testbeds should include realistic vessel anatomy compatible with guidewire and catheter use, while standard testbeds should incorporate deformable vessels. More advanced testbeds should include blood flow, pulsatility, and disease features. There are two macro-classes of effectiveness metrics: one for in silico, in vitro, and ex vivo stages focusing on technical navigation, and another for in vivo stages, focused on clinical outcomes. Patient safety is central to this technology's development. One requisite patient safety task needed now is to correlate in vitro measurements to in vivo complications.
* Published in Journal of the American Heart Association
Learning-Based Autonomous Navigation, Benchmark Environments and Simulation Framework for Endovascular Interventions
Oct 02, 2024



Endovascular interventions are a life-saving treatment for many diseases, yet suffer from drawbacks such as radiation exposure and potential scarcity of proficient physicians. Robotic assistance during these interventions could be a promising support towards these problems. Research focusing on autonomous endovascular interventions utilizing artificial intelligence-based methodologies is gaining popularity. However, variability in assessment environments hinders the ability to compare and contrast the efficacy of different approaches, primarily due to each study employing a unique evaluation framework. In this study, we present deep reinforcement learning-based autonomous endovascular device navigation on three distinct digital benchmark interventions: BasicWireNav, ArchVariety, and DualDeviceNav. The benchmark interventions were implemented with our modular simulation framework stEVE (simulated EndoVascular Environment). Autonomous controllers were trained solely in simulation and evaluated in simulation and on physical test benches with camera and fluoroscopy feedback. Autonomous control for BasicWireNav and ArchVariety reached high success rates and was successfully transferred from the simulated training environment to the physical test benches, while autonomous control for DualDeviceNav reached a moderate success rate. The experiments demonstrate the feasibility of stEVE and its potential for transferring controllers trained in simulation to real-world scenarios. Nevertheless, they also reveal areas that offer opportunities for future research. This study demonstrates the transferability of autonomous controllers from simulation to the real world in endovascular navigation and lowers the entry barriers and increases the comparability of research on endovascular assistance systems by providing open-source training scripts, benchmarks and the stEVE framework.
A Method to use Nonlinear Dynamics in a Whisker Sensor for Terrain Identification by Mobile Robots
Aug 04, 2021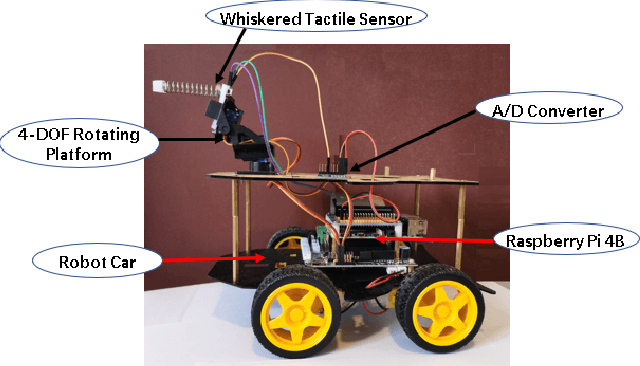
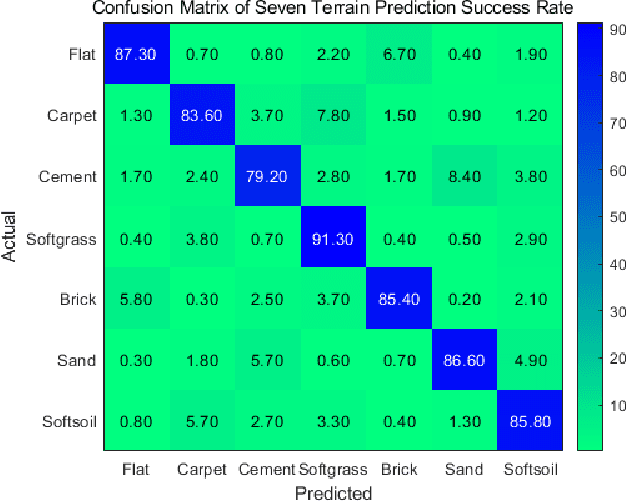
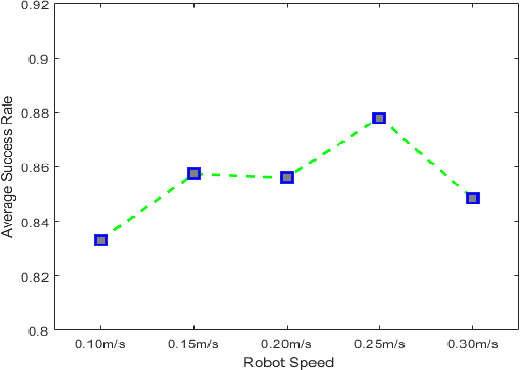
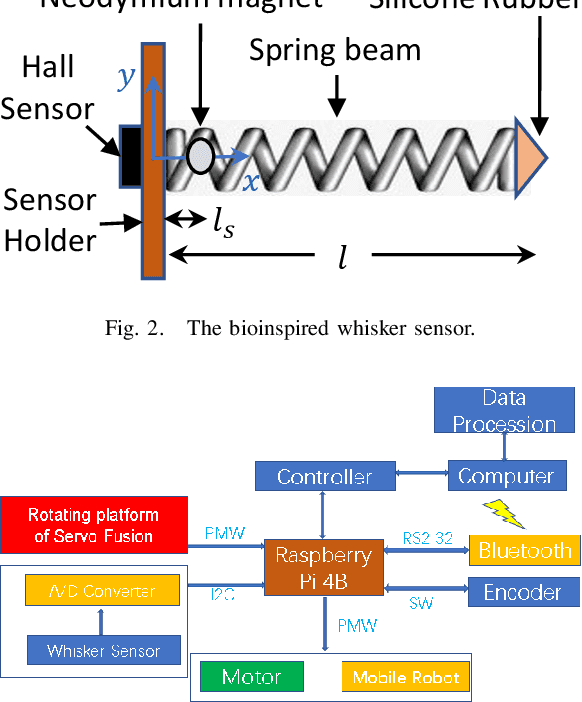
This paper shows analytical and experimental evidence of using the vibration dynamics of a compliant whisker for accurate terrain classification during steady state motion of a mobile robot. A Hall effect sensor was used to measure whisker vibrations due to perturbations from the ground. Analytical results predict that the whisker vibrations will have a dominant frequency at the vertical perturbation frequency of the mobile robot sandwiched by two other less dominant but distinct frequency components. These frequency components may come from bifurcation of vibration frequency due to nonlinear interaction dynamics at steady state. Experimental results also exhibit distinct dominant frequency components unique to the speed of the robot and the terrain roughness. This nonlinear dynamic feature is used in a deep multi-layer perceptron neural network to classify terrains. We achieved 85.6\% prediction success rate for seven flat terrain surfaces with different textures.