 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-material Direct Ink Writing and Embroidery for Stretchable Wearable Sensors
Mar 18, 2026The development of wearable sensing systems for sports performance tracking, rehabilitation, and injury prevention has driven growing demand for smart garments that combine comfort, durability, and accurate motion detection. This paper presents a textile-compatible fabrication workflow that integrates multi-material direct ink writing with automated embroidery to create stretchable strain sensors directly embedded into garments. The process combines sequential multi-material printing of a silicone-carbon grease-silicone stack with automated embroidery that provides both mechanical fixation and electrical interfacing in a single step. The resulting hybrid sensor demonstrates stretchability up to 120% strain while maintaining electrical continuity, with approximately linear behaviour up to 60% strain (R^2 = 0.99), a gauge factor of 31.4, and hysteresis of 22.9%. Repeated loading-unloading tests over 80 cycles show baseline and peak drift of 0.135% and 0.236% per cycle, respectively, indicating moderate cycle-to-cycle stability. Mechanical testing further confirms that the silicone-fabric interface remains intact under large deformation, with failure occurring in the textile rather than at the stitched boundary. As a preliminary proof of concept, the sensor was integrated into wearable elbow and knee sleeves for joint angle monitoring, showing a clear correlation between normalised resistance change and bending angle. By addressing both mechanical fixation and electrical interfacing through embroidery-based integration, this approach provides a reproducible and scalable pathway for incorporating printed stretchable electronics into textile systems for motion capture and soft robotic applications.
Embedded Soft Sensing in Soft Ring Actuator for Aiding with theSelf-Organisation of the In-Hand Rotational Manipulation
Feb 25, 2022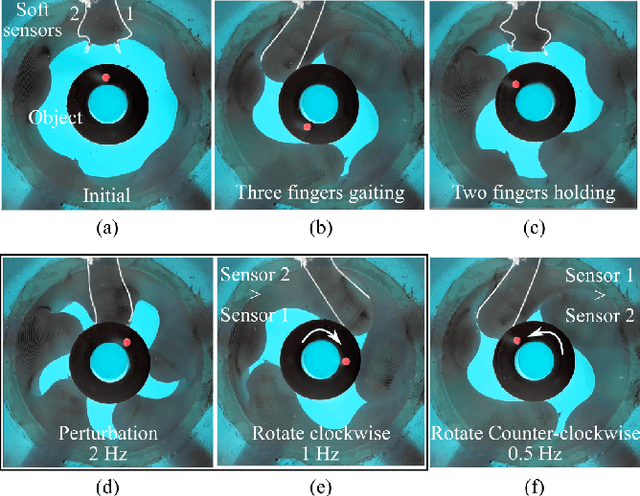
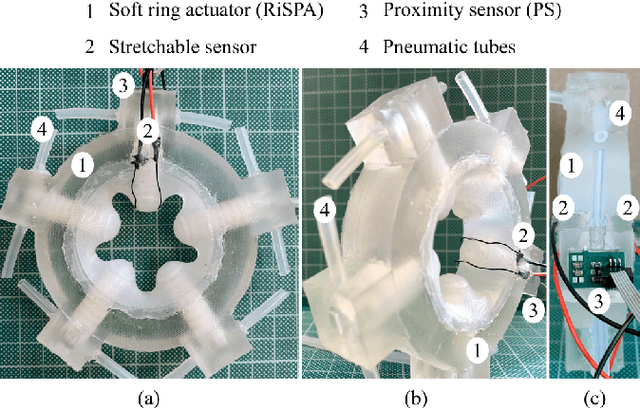
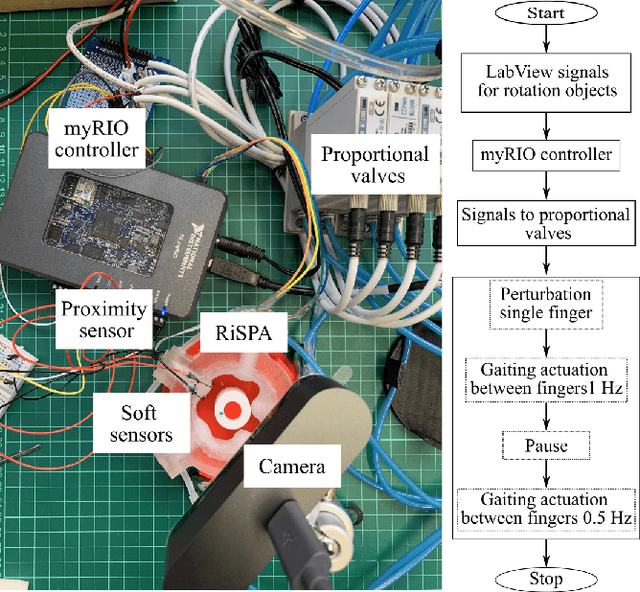
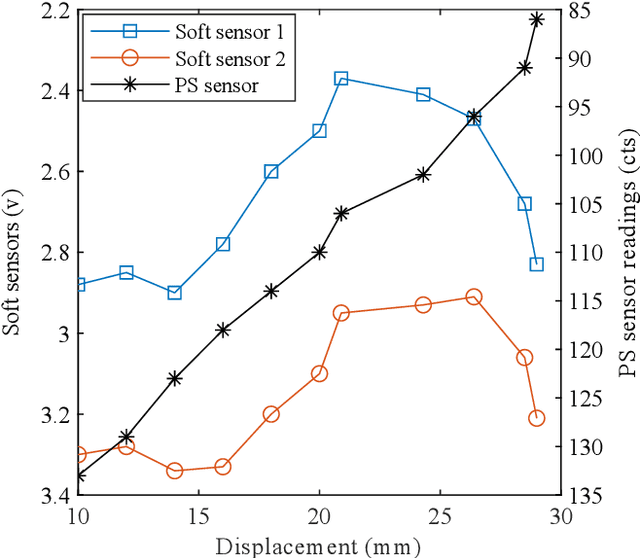
This paper proposes a soft sensor embedded in a soft ring actuator with five fingers as a soft hand to identify the bifurcation of manipulated objects during the in-hand manipulation process. The manipulation is performed by breaking the symmetry method with an underactuated control system by bifurcating the object to clockwise or counter-clockwise rotations. Two soft sensors are embedded in parallel over a single soft finger, and the difference in the resistance measurements is compared when the finger is displaced or bent in a particular direction, which can identify the bifurcation direction and aid in the break of symmetry approach without the need of external tracking devices. The sensors performance is also characterised by extending and bending the finger without an object interaction. During an experiment that performs a break of symmetry, manipulated objects turn clockwise and counter-clockwise depending on the perturbation and actuation frequency, sensors can track the direction of rotation. The embedded sensors provide a self-sensing capability for implementing a closed-loop control in future work. The soft ring actuator performance presents a self-organisation behaviour with soft fingers rotating an object without a required control for rotating the object. Therefore, the soft fingers are an underactuated system with complex behaviour when interacting with objects that serve in-hand manipulation field.
* The papaer is accepted but not published