 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmulating Non-Differentiable Metrics via Knowledge-Guided Learning: Introducing the Minkowski Image Loss
Apr 13, 2026The ``differentiability gap'' presents a primary bottleneck in Earth system deep learning: since models cannot be trained directly on non-differentiable scientific metrics and must rely on smooth proxies (e.g., MSE), they often fail to capture high-frequency details, yielding ``blurry'' outputs. We develop a framework that bridges this gap using two different methods to deal with non-differentiable functions: the first is to analytically approximate the original non-differentiable function into a differentiable equivalent one; the second is to learn differentiable surrogates for scientific functionals. We formulate the analytical approximation by relaxing discrete topological operations using temperature-controlled sigmoids and continuous logical operators. Conversely, our neural emulator uses Lipschitz-convolutional neural networks to stabilize gradient learning via: (1) spectral normalization to bound the Lipschitz constant; and (2) hard architectural constraints enforcing geometric principles. We demonstrate this framework's utility by developing the Minkowski image loss, a differentiable equivalent for the integral-geometric measures of surface precipitation fields (area, perimeter, connected components). Validated on the EUMETNET OPERA dataset, our constrained neural surrogate achieves high emulation accuracy, completely eliminating the geometric violations observed in unconstrained baselines. However, applying these differentiable surrogates to a deterministic super-resolution task reveals a fundamental trade-off: while strict Lipschitz regularization ensures optimization stability, it inherently over-smooths gradient signals, restricting the recovery of highly localized convective textures. This work highlights the necessity of coupling such topological constraints with stochastic generative architectures to achieve full morphological realism.
Decentralized collaborative transport of fabrics using micro-UAVs
Oct 01, 2018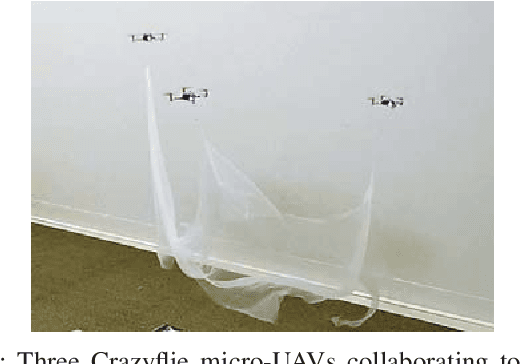
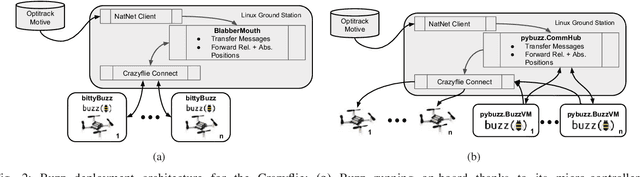
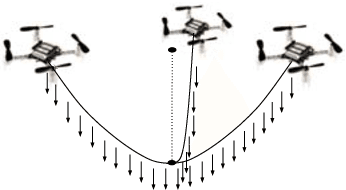
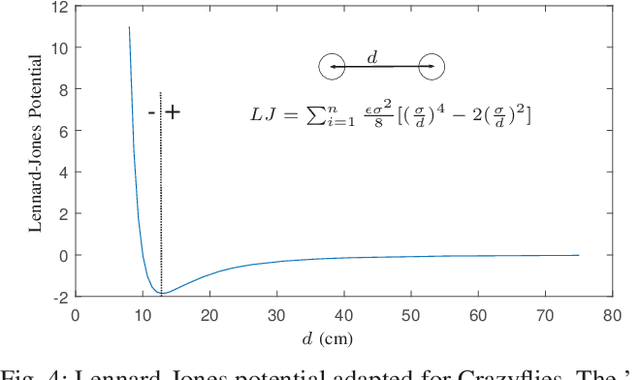
Small unmanned aerial vehicles (UAVs) have generally little capacity to carry payloads. Through collaboration, the UAVs can increase their joint payload capacity and carry more significant loads. For maximum flexibility to dynamic and unstructured environments and task demands, we propose a fully decentralized control infrastructure based on a swarm-specific scripting language, Buzz. In this paper, we describe the control infrastructure and use it to compare two algorithms for collaborative transport: field potentials and spring-damper. We test the performance of our approach with a fleet of micro-UAVs, demonstrating the potential of decentralized control for collaborative transport.