 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollow the Gradient: Crossing the Reality Gap using Differentiable Physics
Sep 10, 2021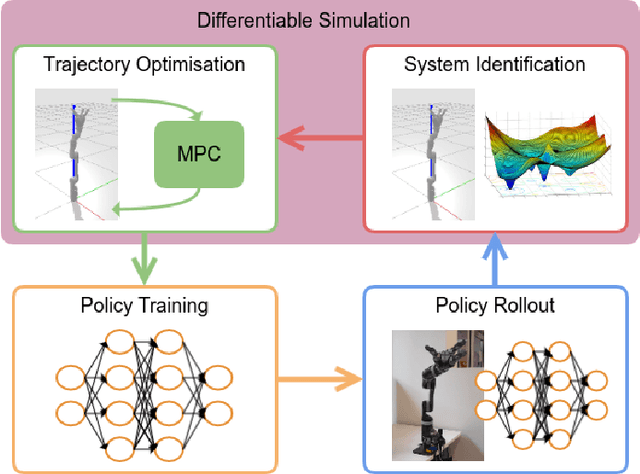
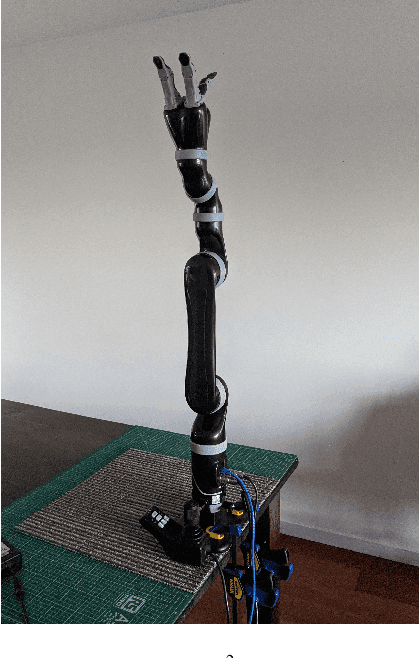
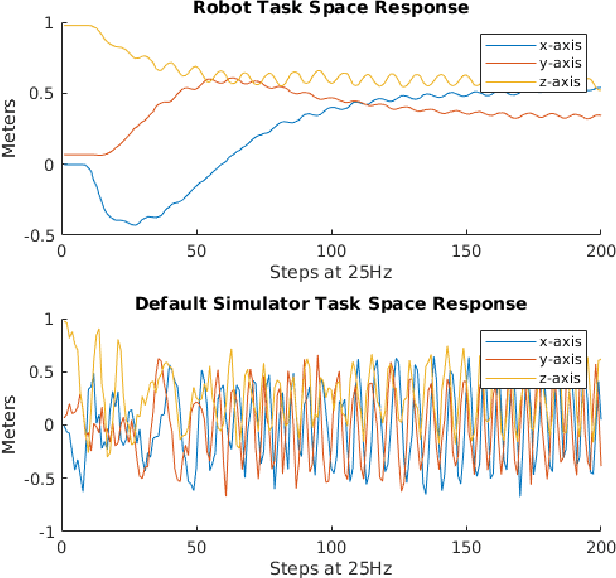
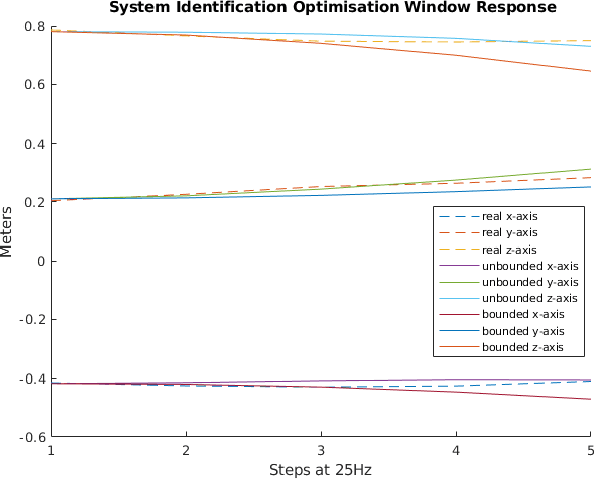
We propose a novel iterative approach for crossing the reality gap that utilises live robot rollouts and differentiable physics. Our method, RealityGrad, demonstrates for the first time, an efficient sim2real transfer in combination with a real2sim model optimisation for closing the reality gap. Differentiable physics has become an alluring alternative to classical rigid-body simulation due to the current culmination of automatic differentiation libraries, compute and non-linear optimisation libraries. Our method builds on this progress and employs differentiable physics for efficient trajectory optimisation. We demonstrate RealitGrad on a dynamic control task for a serial link robot manipulator and present results that show its efficiency and ability to quickly improve not just the robot's performance in real world tasks but also enhance the simulation model for future tasks. One iteration of RealityGrad takes less than 22 minutes on a desktop computer while reducing the error by 2/3, making it efficient compared to other sim2real methods in both compute and time. Our methodology and application of differentiable physics establishes a promising approach for crossing the reality gap and has great potential for scaling to complex environments.
Traversing the Reality Gap via Simulator Tuning
Mar 03, 2020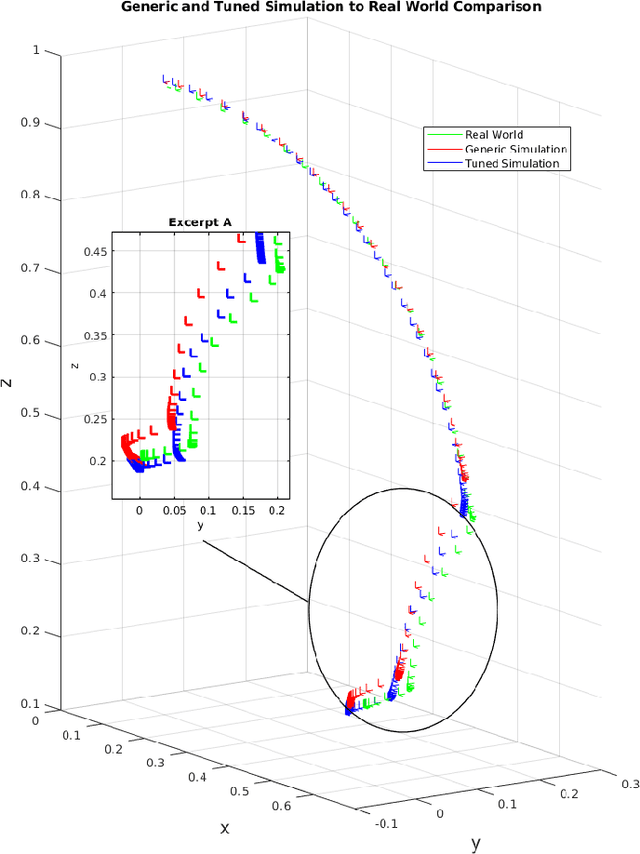
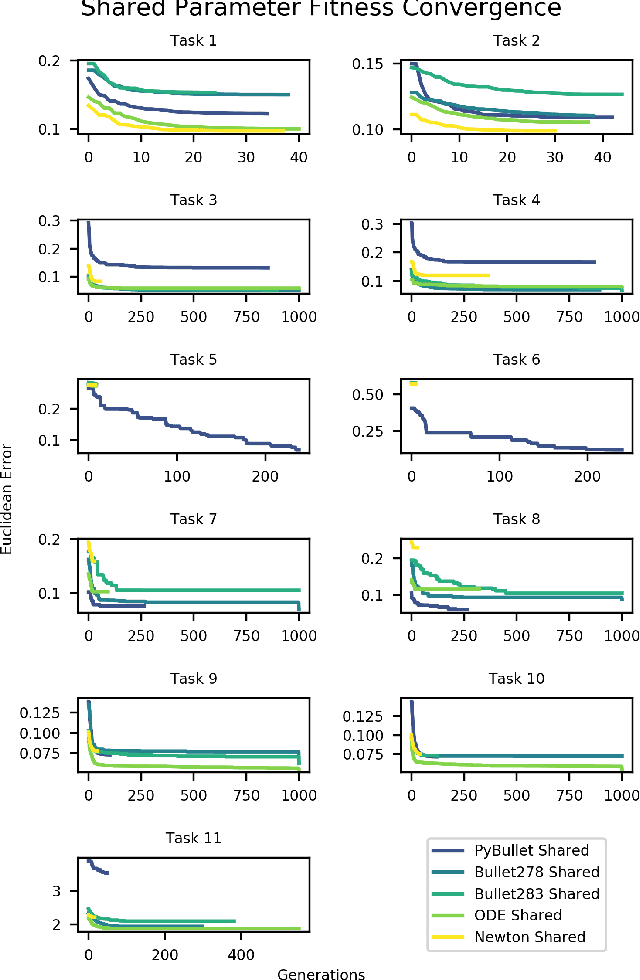
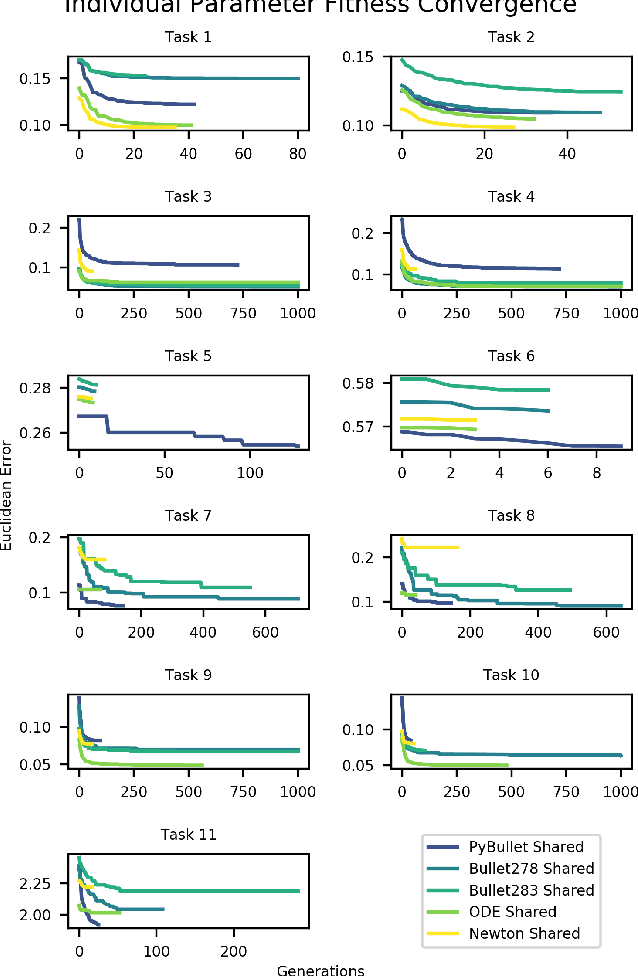
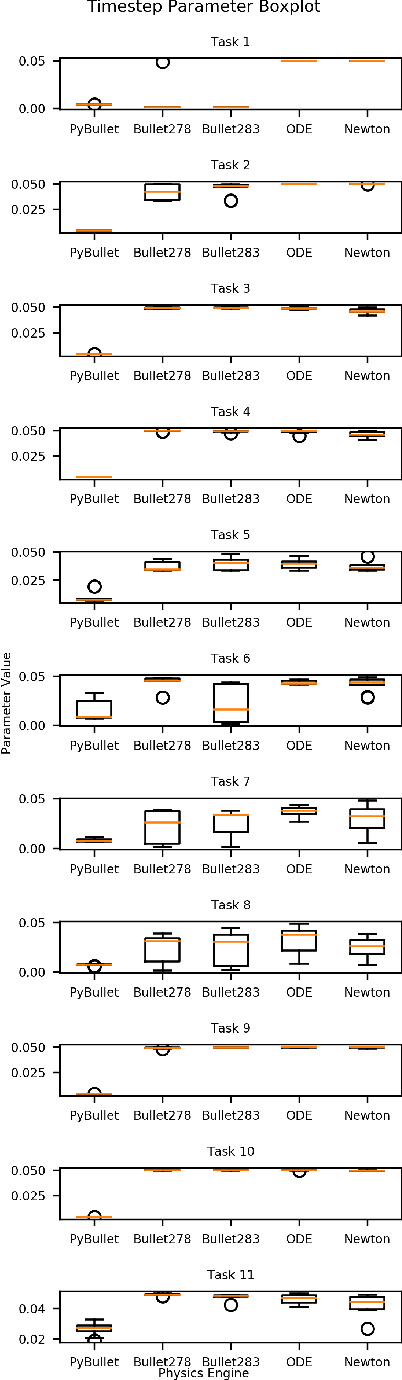
The large demand for simulated data has made the reality gap a problem on the forefront of robotics. We propose a method to traverse the gap by tuning available simulation parameters. Through the optimisation of physics engine parameters, we show that we are able to narrow the gap between simulated solutions and a real world dataset, and thus allow more ready transfer of leaned behaviours between the two. We subsequently gain understanding as to the importance of specific simulator parameters, which is of broad interest to the robotic machine learning community. We find that even optimised for different tasks that different physics engine perform better in certain scenarios and that friction and maximum actuator velocity are tightly bounded parameters that greatly impact the transference of simulated solutions.
Benchmarking Simulated Robotic Manipulation through a Real World Dataset
Nov 27, 2019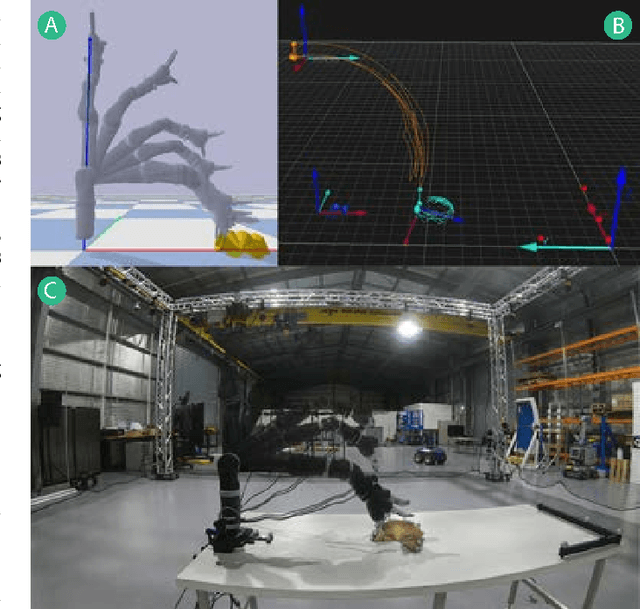
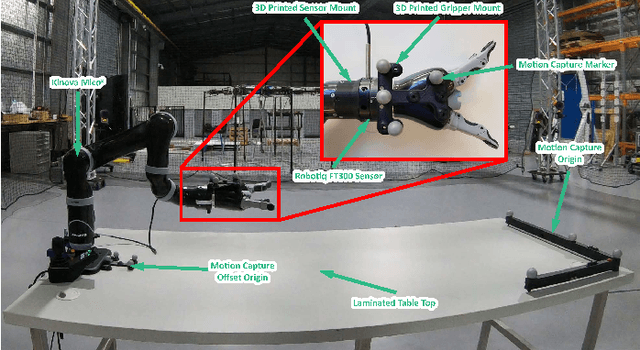
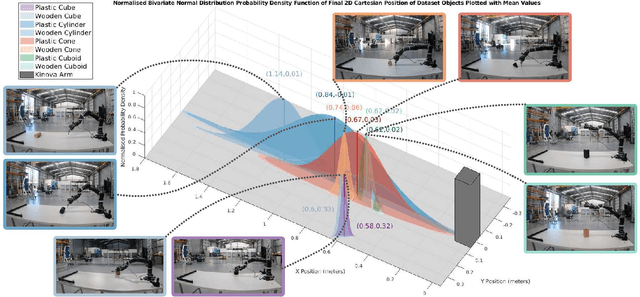
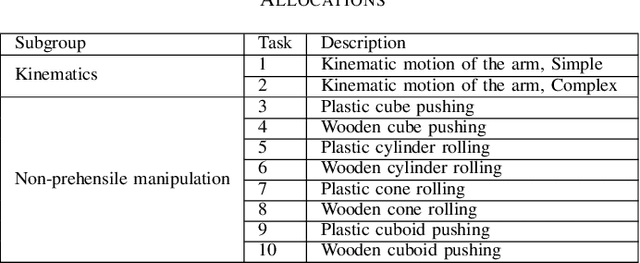
We present a benchmark to facilitate simulated manipulation; an attempt to overcome the obstacles of physical benchmarks through the distribution of a real world, ground truth dataset. Users are given various simulated manipulation tasks with assigned protocols having the objective of replicating the real world results of a recorded dataset. The benchmark comprises of a range of metrics used to characterise the successes of submitted environments whilst providing insight into their deficiencies. We apply our benchmark to two simulation environments, PyBullet and V-Rep, and publish the results. All materials required to benchmark an environment, including protocols and the dataset, can be found at the benchmarks' website https://research.csiro.au/robotics/manipulation-benchmark/.