 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic Framework for Epidemiological Modeling
Jan 30, 2026Epidemic modeling is essential for public health planning, yet traditional approaches rely on fixed model classes that require manual redesign as pathogens, policies, and scenario assumptions evolve. We introduce EPIAGENT, an agentic framework that automatically synthesizes, calibrates, verifies, and refines epidemiological simulators by modeling disease progression as an iterative program synthesis problem. A central design choice is an explicit epidemiological flow graph intermediate representation that links scenario specifications to model structure and enables strong, modular correctness checks before code is generated. Verified flow graphs are then compiled into mechanistic models supporting interpretable parameter learning under physical and epidemiological constraints. Evaluation on epidemiological scenario case studies demonstrates that EPIAGENT captures complex growth dynamics and produces epidemiologically consistent counterfactual projections across varying vaccination and immune escape assumptions. Our results show that the agentic feedback loop prevents degeneration and significantly accelerates convergence toward valid models by mimicking professional expert workflows.
Enumeration of spatial manipulators by using the concept of Adjacency Matrix
Oct 07, 2022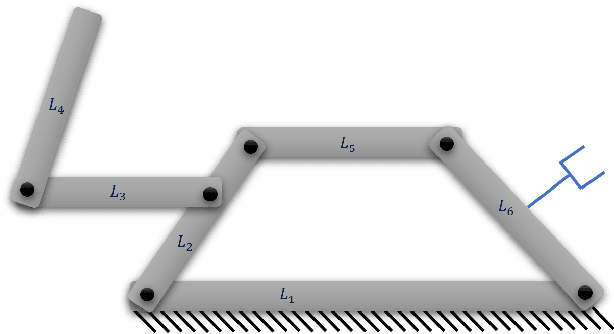
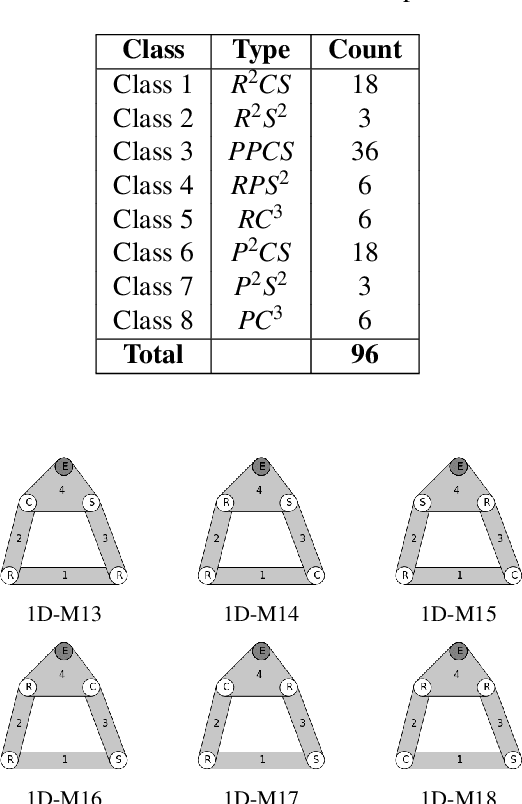
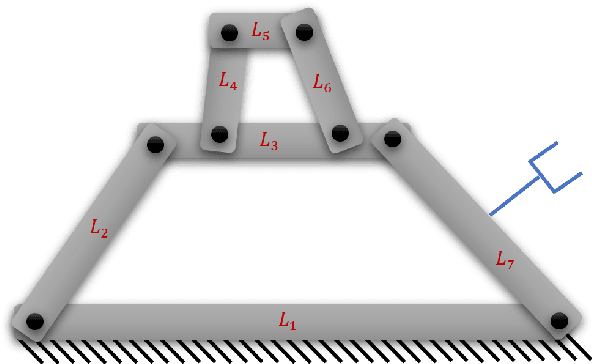
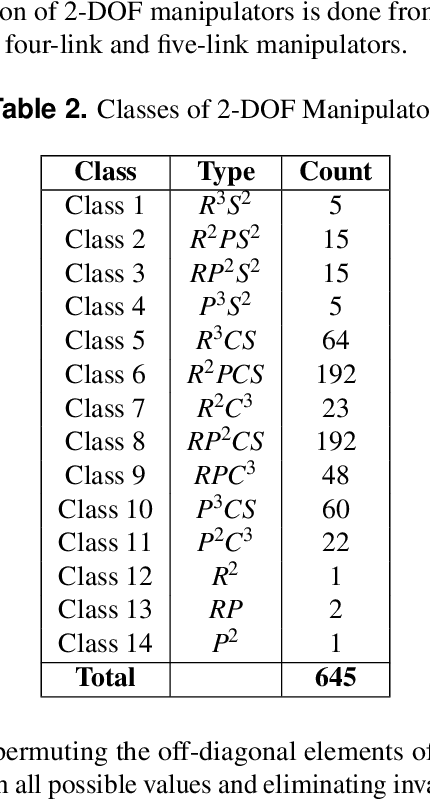
This study is on the enumeration of spatial robotic manipulators, which is an essential basis for a companion study on dimensional synthesis, both of which together present a wider utility in manipulator synthesis. The enumeration of manipulators is done by using adjacency matrix concept. In this paper, a novel way of applying adjacency matrix to spatial manipulators with four types of joints, namely revolute, prismatic, cylindrical and spherical joints, is presented. The limitations of the applicability of the concept to 3D manipulators are discussed. 1-DOF (Degree Of Freedom) manipulators of four links and 2-DOF, 3-DOF and 4-DOF manipulators of three links, four links and five links, are enumerated based on a set of conventions and some assumptions. Finally, 96 1-DOF manipulators of four links, 641 2-DOF manipulators of 5 links, 4 2-DOF manipulators of three links, 8 3-DOF manipulators of four links and 15 4-DOF manipulators of five links are presented.